Устройство для увеличения рабочего усилия или мощности машины в момент особо важных нагрузок, 6 букв
Большая Советская Энциклопедия Значение слова в словаре Большая Советская Энциклопедия
(англ. booster, от boost ≈ повышать давление, напряжение), вспомогательное устройство для увеличения силы и скорости действия основного механизма (агрегата). В авиации ≈ гидравлическое, электрическое или пневматическое вспомогательное устройство в цепи…
Википедия Значение слова в словаре Википедия
Бу́стер (, от boost — поднимать, повышать, усиливать): Бустер — вспомогательное устройство для увеличения силы и скорости действия основного механизма .
Энциклопедический словарь, 1998 г. Значение слова в словаре Энциклопедический словарь, 1998 г.
БУСТЕР (англ. booster) вспомогательное устройство для увеличения силы и скорости действия основного механизма или машины (напр., 1-я ступень многоступенчатой ракеты, гидравлическое, электрическое или пневматическое устройство в цепи управления рулями самолетов)….
Новый толково-словообразовательный словарь русского языка, Т. Ф. Ефремова. Значение слова в словаре Новый толково-словообразовательный словарь русского языка, Т. Ф. Ефремова.
Ф. Ефремова.
м. Устройство для кратковременного увеличения мощности машины или механизма в моменты особо высоких нагрузок.
вспом. ус-во для увелич. силы, тяги и скорости действ. осн. мех-ма, 6 букв
(англ. booster, от boost ≈ повышать давление, напряжение), вспомогательное устройство для увеличения силы и скорости действия основного механизма (агрегата). В авиации ≈ гидравлическое, электрическое или пневматическое вспомогательное устройство в цепи…
Википедия
Бу́стер (, от boost — поднимать, повышать, усиливать): Бустер — вспомогательное устройство для увеличения силы и скорости действия основного механизма .
 Бустер — подкова, которая используется в велотриале для увеличения жёсткости перьев рамы, см. Brake…
Бустер — подкова, которая используется в велотриале для увеличения жёсткости перьев рамы, см. Brake… Новый толково-словообразовательный словарь русского языка, Т. Ф. Ефремова. Значение слова в словаре Новый толково-словообразовательный словарь русского языка, Т. Ф. Ефремова.
Энциклопедический словарь, 1998 г. Значение слова в словаре Энциклопедический словарь, 1998 г.
БУСТЕР (англ. booster) вспомогательное устройство для увеличения силы и скорости действия основного механизма или машины (напр.
Устройство для увеличения рабочего усилия или мощности машины в момент особо важных нагрузок 6 букв
MENU
авиаконструкторавстралия
автомобиль
азия
академия
актер
актриса
алфавит
америка
аппарат
армия
артерия
артист
артистка
архитектор
астронавт
астроном
африка
аэропорт
бабочка
баскетболист
безопасность
берег
биохимик
боксер
болезнь
брат
буква
бумага
век
величество
величина
велосипедист
вершина
вид
вино
владение
власть
военачальник
военный
воздух
война
войска
волейболист
воспаление
воспроизведение
восток
время
выработка
генерал
германия
герой
головной
город
государство
град
гриб
гроссмейстер
группа
давление
движение
действия
депутат
дерево
деталь
деятель
дивизия
дипломат
директор
дисциплина
документ
дорога
драматург
дума
европа
единица
жанр
живописец
животное
жидкость
жизнь
жилище
жудец
журнал
журналист
заблуждение
заболевание
заведение
завет
зал
залив
звание
звезда
зверек
звук
земля
змея
знак
значение
зона
игра
известность
издание
изделие
изложение
изображение
изобретатель
император
империи
имя
инвентарь
индейцы
инструмент
интервал
информация
ископаемые
искусство
исследователь
историк
календарь
камень
карта
катание
категория
кино
киноактриса
класс
клуб
княжество
командир
комиссар
композитор
конструктор
кора
корабль
королевство
космонавт
край
краска
крест
критик
культура
курорт
кустарник
лингвист
листья
лицо
лодка
масса
массив
мастер
масть
математик
материал
машина
мебель
мера
местность
место
металл
метро
метрополитен
мир
мифология
млекопитающее
моллюск
момент
монета
море
моря
музыкант
мука
мышь
название
назначение
напиток
направление
народ
население
наук
небо
номер
носитель
нотация
обезьяна
область
образ
образование
обращение
общество
одежда
океан
округ
орган
организация
организм
орудие
оружие
осадки
основы
остров
отверстие
отношения
отряд
офицер
парк
партии
партийный
певец
певица
педагог
переплетения
период
персонаж
песня
пилотаж
писатель
писательница
питание
планета
пластинка
платье
племя
плод
площадь
поверхность
подгруппа
подразделение
подчинение
покрой
пол
политик
политический
полк
полководец
полоса
полушарие
пользование
помещение
порода
порт
порядок
поселение
поселения
посол
поток
поэт
поэтесса
пояс
правительство
право
предмет
предприниматель
предприятие
премии
препарат
прибор
провинция
продукт
продюсер
произведение
происхождение
промежуток
просвещение
пространство
профессия
проход
птица
пункт
пути
пьеса
работа
работник
разведчик
размер
район
распространение
растение
реакция
революционер
революция
регион
редактор
режиссер
река
республика
республики
ресторан
речь
рога
род
роль
роман
россия
руководитель
русская
русский
русь
рыба
рыбка
сборная
сгорание
секретарь
секреция
силы
система
склон
скульптор
славяне
словарь
слово
слой
служба
смысл
снаряд
снасть
собака
собрание
совет
советник
соединение
МАШИНЫ И МЕХАНИЗМЫ — это. .. Что такое МАШИНЫ И МЕХАНИЗМЫ?
.. Что такое МАШИНЫ И МЕХАНИЗМЫ?
 .. Что такое МАШИНЫ И МЕХАНИЗМЫ?
.. Что такое МАШИНЫ И МЕХАНИЗМЫ?- МАШИНЫ И МЕХАНИЗМЫ
механические устройства, облегчающие труд и повышающие его производительность. Машины могут быть разной степени сложности — от простой одноколесной тачки до лифтов, автомобилей, печатных, текстильных, вычислительных машин. Энергетические машины преобразуют один вид энергии в другой. Например, генераторы гидроэлектростанции преобразуют механическую энергию падающей воды в электрическую энергию. Двигатель внутреннего сгорания преобразует химическую энергию бензина в тепловую, а затем в механическую энергию движения автомобиля
(см. также
ЭЛЕКТРОМАШИННЫЕ ГЕНЕРАТОРЫ И ЭЛЕКТРОДВИГАТЕЛИ;
ТУРБИНА).
Так называемые рабочие машины преобразуют свойства или состояние материалов (металлорежущие станки, транспортные машины) либо информацию (вычислительные машины). Машины состоят из механизмов (двигательного, передаточного и исполнительного) — многозвенных устройств, передающих и преобразующих силу и движение. Простой механизм, называемый полиспастом
(см. БЛОКИ И ПОЛИСПАСТЫ),
увеличивает силу, приложенную к грузу, и за счет этого позволяет вручную поднимать тяжелые предметы. Другие механизмы облегчают работу, увеличивая скорость. Так, велосипедная цепь, входящая в зацепление со звездочкой, преобразует медленное вращение педалей в быстрое вращение заднего колеса. Однако механизмы, увеличивающие скорость, делают это за счет уменьшения силы, а увеличивающие силу — за счет уменьшения скорости. Увеличить одновременно и скорость и силу невозможно. Механизмы могут также просто изменять направление силы. Пример — блок на конце флагштока: чтобы поднять флаг, тянут за шнур вниз. Изменение направления может сочетаться с увеличением силы или скорости. Так, тяжелый груз можно приподнять, нажимая на рычаг вниз.
ОСНОВНЫЕ ПРИНЦИПЫ РАБОТЫ МАШИН И МЕХАНИЗМОВ
Основной закон. Хотя механизмы и позволяют получить выигрыш в силе или скорости, возможности такого выигрыша ограничиваются законом сохранения энергии.
В применении к машинам и механизмам он гласит: энергия не может ни возникать, ни исчезать, она может быть лишь преобразована в другие виды энергии или в работу. Поэтому на выходе машины или механизма не может оказаться больше энергии, чем на входе. К тому же в реальных машинах часть энергии теряется из-за трения. Поскольку работа может быть превращена в энергию и наоборот, закон сохранения энергии для машин и механизмов можно записать в виде Работа на входе = Работа на выходе + Потери на трение. Отсюда видно, в частности, почему невозможна машина типа вечного двигателя: из-за неизбежных потерь энергии на трение она рано или поздно остановится.
Выигрыш в силе или скорости. Механизмы, как указывалось выше, могут применяться для увеличения силы или скорости. Идеальный, или теоретический, выигрыш в силе или скорости — это коэффициент увеличения силы или скорости, который был бы возможен в отсутствие потерь энергии, обусловленных трением. Идеальный выигрыш на практике недостижим. Реальный выигрыш, например в силе, равен отношению силы (называемой нагрузкой), которую развивает механизм, к силе (называемой усилием), которая прикладывается к механизму.
Механический КПД. Коэффициентом полезного
действия машины называется процентное отношение работы на ее выходе к работе на ее входе. Для механизма КПД равен отношению реального выигрыша к идеальному. КПД рычага может быть очень высоким — до 90% и даже больше. В то же время КПД полиспаста из-за значительного трения и массы движущихся частей обычно не превышает 50%. КПД домкрата может составлять лишь 25% из-за большой площади контакта между винтом и его корпусом, а следовательно, большого трения. Это приблизительно такой же КПД, как у автомобильного двигателя. См. АВТОМОБИЛЬ ЛЕГКОВОЙ. КПД можно в известных пределах повысить, уменьшив трение за счет смазки и применения подшипников качения. См. также СМАЗКА.
ПРОСТЕЙШИЕ МЕХАНИЗМЫ
Простейшие механизмы можно найти почти в любых более сложных машинах и механизмах. Их всего шесть: рычаг, блок, дифференциальный ворот, наклонная плоскость, клин и винт. Некоторые авторитетные специалисты утверждают, что на самом деле можно говорить всего лишь о двух простейших механизмах — рычаге и наклонной плоскости, — так как нетрудно показать, что блок и ворот представляют собой варианты рычага, а клин и винт — варианты наклонной плоскости.
Рычаг. Это жесткий стержень, который может свободно поворачиваться относительно неподвижной точки, называемой точкой опоры. Примером рычага могут служить лом, молоток с расщепом, тачка, метла. Рычаги бывают трех родов, различающихся взаимным расположением точек приложения нагрузки и усилия и точки опоры (рис. 1). Идеальный выигрыш в силе рычага равен отношению расстояния DE от точки приложения усилия до точки опоры к расстоянию DL от точки приложения нагрузки до точки опоры. Для рычага I рода расстояние DE обычно больше DL, а поэтому идеальный выигрыш в силе больше 1. Для рычага II рода идеальный выигрыш в силе тоже больше единицы. Что же касается рычага III рода, то величина DE для него меньше DL, а стало быть, больше единицы выигрыш в скорости.
Рис. 1. РЫЧАГИ I, II И III РОДА
Блок. Это колесо с желобом по окружности для каната или цепи. Блоки применяются в грузоподъемных устройствах. Система блоков и тросов, предназначенная для повышения грузоподъемности, называется полиспастом. Одиночный блок может быть либо с закрепленной осью (уравнительным), либо подвижным (рис. 2). Блок с закрепленной осью действует как рычаг I рода с точкой опоры на его оси. Поскольку плечо усилия равно плечу нагрузки (радиус блока), идеальный выигрыш в силе и скорости равен 1. Подвижный же блок действует как рычаг II рода, поскольку нагрузка расположена между точкой опоры и усилием. Плечо нагрузки (радиус блока) вдвое меньше плеча усилия (диаметр блока). Поэтому для подвижного блока идеальный выигрыш в силе равен 2.
Рис. 2. БЛОК может быть закрепленным (уравнительным) или подвижным. Уравнительный блок действует как рычаг I рода, а подвижный — как рычаг II рода.
Более простой способ определения идеального выигрыша в силе для блока или системы блоков — по числу параллельных концов каната, удерживающих нагрузку, как это нетрудно сообразить, взглянув на рис. 2. Уравнительные и подвижные блоки можно сочетать по-разному для увеличения выигрыша в силе. В одной обойме можно установить два, три или большее число блоков, а конец троса можно прикрепить либо к неподвижной, либо к подвижной обойме.
Дифференциальный ворот. Это, в сущности, два колеса, соединенные вместе и вращающиеся вокруг одной оси (рис. 3), например, колодезный ворот с ручкой.
Рис 3. ВОРОТ, действующий как рычаг I рода, представляет собой, в сущности, два скрепленных вместе колеса, вращающихся вокруг общей оси.
Дифференциальный ворот может давать выигрыш как в силе, так и в скорости. Это зависит от того, где прилагается усилие, а где — нагрузка, поскольку он действует как рычаг I рода. Точка опоры расположена на закрепленной (фиксированной) оси, а поэтому плечи усилия и нагрузки равны радиусам соответствующих колес. Пример такого устройства для выигрыша в силе — отвертка, а для выигрыша в скорости — шлифовальный круг.
Зубчатые колеса. Система двух находящихся в зацеплении зубчатых колес, сидящих на валах одинакового диаметра (рис. 4), в какой-то мере аналогична дифференциальному вороту (см. также ЗУБЧАТАЯ ПЕРЕДАЧА). Скорость вращения колес обратно пропорциональна их диаметру. Если малая ведущая шестерня A (к которой приложено усилие) по диаметру вдвое меньше большого зубчатого колеса B, то она должна вращаться вдвое быстрее. Таким образом, выигрыш в силе такой зубчатой передачи равен 2. Но если точки приложения усилия и нагрузки поменять местами, так что колесо B станет ведущим, то выигрыш в силе будет равен 1/2, а выигрыш в скорости — 2.
Рис. 4. ЗУБЧАТЫЕ КОЛЕСА, действующие в принципе так же, как и ворот, могут давать как выигрыш в силе, так и выигрыш в скорости.
Наклонная плоскость. Наклонная плоскость применяется для перемещения тяжелых предметов на более высокий уровень без их непосредственного поднятия. К таким устройствам относятся пандусы, эскалаторы, обычные лестницы, а также конвейеры (с роликами для уменьшения трения). Идеальный выигрыш в силе, обеспечиваемый наклонной плоскостью (рис. 5), равен отношению расстояния, на которое перемещается нагрузка, к расстоянию, проходимому точкой приложения усилия. Первое есть длина наклонной плоскости, а второе — высота, на которую поднимается груз. Поскольку гипотенуза больше катета, наклонная плоскость всегда дает выигрыш в силе. Выигрыш тем больше, чем меньше наклон плоскости. Этим объясняется то, что горные автомобильные и железные дороги имеют вид серпантина: чем меньше крутизна дороги, тем легче по ней подниматься.
Рис. 5. НАКЛОННАЯ ПЛОСКОСТЬ дает выигрыш в силе, равный (в идеале) отношению длины к высоте.
Клин. Это, в сущности, сдвоенная наклонная плоскость (рис. 6). Главное его отличие от наклонной плоскости в том, что она обычно неподвижна, и груз под действием усилия движется по ней, а клин вгоняют под нагрузку или в нагрузку. Принцип клина используется в таких инструментах и орудиях, как топор, зубило, нож, гвоздь, швейная игла.
Рис. 6. КЛИН — как бы сдвоенная наклонная плоскость. Идеальный выигрыш в силе равен отношению длины клина к толщине на тупом конце.
Идеальный выигрыш в силе, даваемый клином, равен отношению его длины к толщине на тупом конце. Реальный выигрыш клина, в отличие от других простейших механизмов, трудно определить. Сопротивление, встречаемое им, непредсказуемо меняется для разных участков его «щек». Из-за большого трения его КПД столь мал, что идеальный выигрыш не имеет особого значения.
Винт. Резьба винта (рис. 7) — это, в сущности, наклонная плоскость, многократно обернутая вокруг цилиндра. В зависимости от направления подъема наклонной плоскости винтовая резьба может быть левой (A) или правой (B). Сопрягающаяся деталь, естественно, должна иметь резьбу такого же направления. Примеры простых устройств с винтовой резьбой — домкрат, болт с гайкой, микрометр, тиски.
Рис. 7. ВИНТ с прямоугольной резьбой — по существу, наклонная плоскость, многократно обернутая вокруг цилиндра. A — левая, B — правая резьба.
Поскольку резьба — наклонная плоскость, она всегда дает выигрыш в силе. Идеальный выигрыш равен отношению расстояния, проходимого точкой приложения усилия за один оборот винта (длины окружности), к расстоянию, проходимому при этом нагрузкой по оси винта. За один оборот нагрузка перемещается на расстояние между двумя соседними витками резьбы (a и b или b и c на рис. 7), которое называется шагом резьбы. Шаг резьбы обычно значительно меньше ее диаметра, так как иначе слишком велико трение.
КОМБИНИРОВАННЫЕ МЕХАНИЗМЫ
Комбинированный механизм состоит из двух или большего числа простых. Это не обязательно сложное устройство; многие довольно простые механизмы тоже можно считать комбинированными. Например, в мясорубке имеются ворот (ручка), винт (проталкивающий мясо) и клин (нож-резак). Стрелки наручных часов поворачиваются системой зубчатых колес разного диаметра, находящихся в зацеплении друг с другом. Один из наиболее известных несложных комбинированных механизмов — домкрат. Домкрат (рис. 8) представляет собой комбинацию винта и ворота. Головка винта подпирает нагрузку, а другой его конец входит в резьбовую опору. Усилие прилагается к рукоятке, закрепленной в головке винта. Таким образом, расстояние усилия равно длине окружности, описываемой концом ручки. Длина окружности дается выражением 2pr, где p = 3,14159, а r — радиус окружности, т.е. в данном случае длина ручки. Очевидно, что чем длиннее ручка, тем больше идеальный выигрыш в силе. Расстояние, проходимое нагрузкой за один оборот ручки, равно шагу резьбы. В идеале можно получить очень большой выигрыш в силе, если длинную ручку сочетать с малым шагом резьбы. Поэтому несмотря на малый КПД домкрата (около 25%) он дает большой реальный выигрыш в силе.
Рис. 8. ДОМКРАТ — пример несложного комбинированного механизма (сочетание винта и ворота).
Выигрыш в силе, создаваемый комбинированным механизмом, равен произведению выигрышей отдельных механизмов, входящих в его состав. Так, идеальный выигрыш в силе (ИВС) для домкрата равен отношению длины окружности, описываемой ручкой, к шагу резьбы. Для входящего в состав домкрата ворота ИВС равен отношению длины окружности, описываемой ручкой (расстояние усилия), к длине окружности винта (расстояние нагрузки). Для винта домкрата ИВС равен отношению длины окружности винта (расстояния усилия) к шагу резьбы винта (расстоянию нагрузки). Перемножая ИВС отдельных механизмов домкрата, получаем для комбинированного механизма ИВС = (Окружность ручки/Окружность винта) * (Окружность винта/Шаг резьбы) = (Окружность ручки/Шаг резьбы). Для более сложных комбинированных механизмов вычислить ИВС труднее. Поэтому для них обычно указывают лишь реальный выигрыш.
См. также
КУЛАЧКОВЫЙ МЕХАНИЗМ;
ДИНАМИКА;
СТАНКИ МЕТАЛЛОРЕЖУЩИЕ;
МЕХАНИКА.
ЛИТЕРАТУРА
Попов С.А. Курсовое проектирование по теории механизмов и машин. М., 1986
 Простой механизм, называемый полиспастом
Простой механизм, называемый полиспастом В применении к машинам и механизмам он гласит: энергия не может ни возникать, ни исчезать, она может быть лишь преобразована в другие виды энергии или в работу. Поэтому на выходе машины или механизма не может оказаться больше энергии, чем на входе. К тому же в реальных машинах часть энергии теряется из-за трения. Поскольку работа может быть превращена в энергию и наоборот, закон сохранения энергии для машин и механизмов можно записать в виде Работа на входе = Работа на выходе + Потери на трение. Отсюда видно, в частности, почему невозможна машина типа вечного двигателя: из-за неизбежных потерь энергии на трение она рано или поздно остановится.
В применении к машинам и механизмам он гласит: энергия не может ни возникать, ни исчезать, она может быть лишь преобразована в другие виды энергии или в работу. Поэтому на выходе машины или механизма не может оказаться больше энергии, чем на входе. К тому же в реальных машинах часть энергии теряется из-за трения. Поскольку работа может быть превращена в энергию и наоборот, закон сохранения энергии для машин и механизмов можно записать в виде Работа на входе = Работа на выходе + Потери на трение. Отсюда видно, в частности, почему невозможна машина типа вечного двигателя: из-за неизбежных потерь энергии на трение она рано или поздно остановится. Реальный выигрыш, например в силе, равен отношению силы (называемой нагрузкой), которую развивает механизм, к силе (называемой усилием), которая прикладывается к механизму.
Реальный выигрыш, например в силе, равен отношению силы (называемой нагрузкой), которую развивает механизм, к силе (называемой усилием), которая прикладывается к механизму. Их всего шесть: рычаг, блок, дифференциальный ворот, наклонная плоскость, клин и винт. Некоторые авторитетные специалисты утверждают, что на самом деле можно говорить всего лишь о двух простейших механизмах — рычаге и наклонной плоскости, — так как нетрудно показать, что блок и ворот представляют собой варианты рычага, а клин и винт — варианты наклонной плоскости.
Их всего шесть: рычаг, блок, дифференциальный ворот, наклонная плоскость, клин и винт. Некоторые авторитетные специалисты утверждают, что на самом деле можно говорить всего лишь о двух простейших механизмах — рычаге и наклонной плоскости, — так как нетрудно показать, что блок и ворот представляют собой варианты рычага, а клин и винт — варианты наклонной плоскости. Что же касается рычага III рода, то величина DE для него меньше DL, а стало быть, больше единицы выигрыш в скорости.
Что же касается рычага III рода, то величина DE для него меньше DL, а стало быть, больше единицы выигрыш в скорости.
 Пример такого устройства для выигрыша в силе — отвертка, а для выигрыша в скорости — шлифовальный круг.
Пример такого устройства для выигрыша в силе — отвертка, а для выигрыша в скорости — шлифовальный круг. К таким устройствам относятся пандусы, эскалаторы, обычные лестницы, а также конвейеры (с роликами для уменьшения трения). Идеальный выигрыш в силе, обеспечиваемый наклонной плоскостью (рис. 5), равен отношению расстояния, на которое перемещается нагрузка, к расстоянию, проходимому точкой приложения усилия. Первое есть длина наклонной плоскости, а второе — высота, на которую поднимается груз. Поскольку гипотенуза больше катета, наклонная плоскость всегда дает выигрыш в силе. Выигрыш тем больше, чем меньше наклон плоскости. Этим объясняется то, что горные автомобильные и железные дороги имеют вид серпантина: чем меньше крутизна дороги, тем легче по ней подниматься.
К таким устройствам относятся пандусы, эскалаторы, обычные лестницы, а также конвейеры (с роликами для уменьшения трения). Идеальный выигрыш в силе, обеспечиваемый наклонной плоскостью (рис. 5), равен отношению расстояния, на которое перемещается нагрузка, к расстоянию, проходимому точкой приложения усилия. Первое есть длина наклонной плоскости, а второе — высота, на которую поднимается груз. Поскольку гипотенуза больше катета, наклонная плоскость всегда дает выигрыш в силе. Выигрыш тем больше, чем меньше наклон плоскости. Этим объясняется то, что горные автомобильные и железные дороги имеют вид серпантина: чем меньше крутизна дороги, тем легче по ней подниматься. Принцип клина используется в таких инструментах и орудиях, как топор, зубило, нож, гвоздь, швейная игла.
Принцип клина используется в таких инструментах и орудиях, как топор, зубило, нож, гвоздь, швейная игла.
 Один из наиболее известных несложных комбинированных механизмов — домкрат. Домкрат (рис. 8) представляет собой комбинацию винта и ворота. Головка винта подпирает нагрузку, а другой его конец входит в резьбовую опору. Усилие прилагается к рукоятке, закрепленной в головке винта. Таким образом, расстояние усилия равно длине окружности, описываемой концом ручки. Длина окружности дается выражением 2pr, где p = 3,14159, а r — радиус окружности, т.е. в данном случае длина ручки. Очевидно, что чем длиннее ручка, тем больше идеальный выигрыш в силе. Расстояние, проходимое нагрузкой за один оборот ручки, равно шагу резьбы. В идеале можно получить очень большой выигрыш в силе, если длинную ручку сочетать с малым шагом резьбы. Поэтому несмотря на малый КПД домкрата (около 25%) он дает большой реальный выигрыш в силе.
Один из наиболее известных несложных комбинированных механизмов — домкрат. Домкрат (рис. 8) представляет собой комбинацию винта и ворота. Головка винта подпирает нагрузку, а другой его конец входит в резьбовую опору. Усилие прилагается к рукоятке, закрепленной в головке винта. Таким образом, расстояние усилия равно длине окружности, описываемой концом ручки. Длина окружности дается выражением 2pr, где p = 3,14159, а r — радиус окружности, т.е. в данном случае длина ручки. Очевидно, что чем длиннее ручка, тем больше идеальный выигрыш в силе. Расстояние, проходимое нагрузкой за один оборот ручки, равно шагу резьбы. В идеале можно получить очень большой выигрыш в силе, если длинную ручку сочетать с малым шагом резьбы. Поэтому несмотря на малый КПД домкрата (около 25%) он дает большой реальный выигрыш в силе. Так, идеальный выигрыш в силе (ИВС) для домкрата равен отношению длины окружности, описываемой ручкой, к шагу резьбы. Для входящего в состав домкрата ворота ИВС равен отношению длины окружности, описываемой ручкой (расстояние усилия), к длине окружности винта (расстояние нагрузки). Для винта домкрата ИВС равен отношению длины окружности винта (расстояния усилия) к шагу резьбы винта (расстоянию нагрузки). Перемножая ИВС отдельных механизмов домкрата, получаем для комбинированного механизма ИВС = (Окружность ручки/Окружность винта) * (Окружность винта/Шаг резьбы) = (Окружность ручки/Шаг резьбы). Для более сложных комбинированных механизмов вычислить ИВС труднее. Поэтому для них обычно указывают лишь реальный выигрыш.
Так, идеальный выигрыш в силе (ИВС) для домкрата равен отношению длины окружности, описываемой ручкой, к шагу резьбы. Для входящего в состав домкрата ворота ИВС равен отношению длины окружности, описываемой ручкой (расстояние усилия), к длине окружности винта (расстояние нагрузки). Для винта домкрата ИВС равен отношению длины окружности винта (расстояния усилия) к шагу резьбы винта (расстоянию нагрузки). Перемножая ИВС отдельных механизмов домкрата, получаем для комбинированного механизма ИВС = (Окружность ручки/Окружность винта) * (Окружность винта/Шаг резьбы) = (Окружность ручки/Шаг резьбы). Для более сложных комбинированных механизмов вычислить ИВС труднее. Поэтому для них обычно указывают лишь реальный выигрыш. Энциклопедия Кольера. — Открытое общество.
2000.
— Открытое общество.
2000.
- СТАНКИ МЕТАЛЛОРЕЖУЩИЕ
- БАТИСТА-И-САЛЬДИВАР Рубен Фульхенсио
Смотреть что такое «МАШИНЫ И МЕХАНИЗМЫ» в других словарях:
Машины и Механизмы — «Машины и Механизмы» Специализация: научно популярный Периодичность: ежемесячно Сокращённое название: ММ Язык: русский Адрес редакции: 197110, Санкт Петербург, ул. Большая Разночинная 28 … Википедия
Машины и механизмы, применяемые при монтаже. — 8. Машины и механизмы, применяемые при монтаже. Кран на автомобильном ходу г.п. 10 т и кран на гусеничном ходу г.п. до 100 т. Автотранспортные средства для перевозки упакованных поставочных единиц к месту монтажа г.п. 5 т, тракторы на гусеничном… … Словарь-справочник терминов нормативно-технической документации
ГОСТ 12.2.106-85: Система стандартов безопасности труда. Машины и механизмы, применяемые при разработке рудных, нерудных и россыпных месторождений полезных ископаемых.
Общие гигиенические требования и методы оценки — Терминология ГОСТ 12.2.106 85: Система стандартов безопасности труда. Машины и механизмы, применяемые при разработке рудных, нерудных и россыпных месторождений полезных ископаемых. Общие гигиенические требования и методы оценки оригинал документа … Словарь-справочник терминов нормативно-технической документациимашины — 3.26 машины (machinery): Устройство, состоящее из соединенных между собой частей или компонентов, по крайней мере, один из которых движется, с соответствующими исполнительными механизмами, силовыми цепями и цепями управления и т.д., объединенных… … Словарь-справочник терминов нормативно-технической документации
Машины погрузочно – разгрузочные — – основная цель этих машин и механизмов – работы по перемещению различных грузов. Обычно это самоходные универсальные машины на базе, как правило, колесных транспортных средств. В них тоже применяются быстросъемные рабочие… … Энциклопедия терминов, определений и пояснений строительных материалов
Машины грузоподьемные — – краны всех типов, краны экскаваторы (экскаваторы, предназначенные для работы с крюком, подвешенным на канате), тали, лебедки для подъема груза и людей.
[Правила техники безопасности при эксплуатации теплопотребляющих установок и тепловых… … Энциклопедия терминов, определений и пояснений строительных материаловМашины для рыхления заполнителей — – устройства и механизмы, предназначенные для восстановления сыпучести смерзшихся заполнителей при их выгрузке; по принципу действия делятся на вибрационные и виброударные. [Терминологический словарь по бетону и железобетону. ФГУП «НИЦ… … Энциклопедия терминов, определений и пояснений строительных материалов
Машины разгрузочные — – предназначены для выгрузки заполнителей из полувагонов и платформ (из полувагонов выгрузка осуществляется многоковшовым элеватором, из платформ толкателем; подача в штабель, силоса ленточными конвейерами). [Терминологический словарь… … Энциклопедия терминов, определений и пояснений строительных материалов
МАШИНЫ МУСОРНЫЕ, МУСОРОУДАЛИТЕЛИ — вспомогательные судовые механизмы, служащие для выгрузки из кочегарных отделений золы и шлака, вычищенных из топок котлов.
По своему устройству мусорные машины разделяются на: мусорные лебедки, поднимающие мусор в ведрах из кочегарок на верхнюю… … Морской словарьМАШИНЫ ШПИЛЕВЫЕ — судовые вспомогательные механизмы, служащие для выбирания ката и др. тяжелых работ по тяге тросов и цепей. М. Ш. бывают паровые и электрические. Самойлов К. И. Морской словарь. М. Л.: Государственное Военно морское Издательство НКВМФ Союза ССР,… … Морской словарь
 Общие гигиенические требования и методы оценки — Терминология ГОСТ 12.2.106 85: Система стандартов безопасности труда. Машины и механизмы, применяемые при разработке рудных, нерудных и россыпных месторождений полезных ископаемых. Общие гигиенические требования и методы оценки оригинал документа … Словарь-справочник терминов нормативно-технической документации
Общие гигиенические требования и методы оценки — Терминология ГОСТ 12.2.106 85: Система стандартов безопасности труда. Машины и механизмы, применяемые при разработке рудных, нерудных и россыпных месторождений полезных ископаемых. Общие гигиенические требования и методы оценки оригинал документа … Словарь-справочник терминов нормативно-технической документации [Правила техники безопасности при эксплуатации теплопотребляющих установок и тепловых… … Энциклопедия терминов, определений и пояснений строительных материалов
[Правила техники безопасности при эксплуатации теплопотребляющих установок и тепловых… … Энциклопедия терминов, определений и пояснений строительных материалов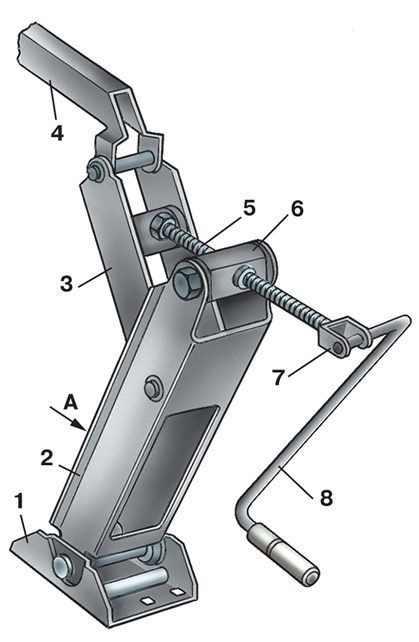 По своему устройству мусорные машины разделяются на: мусорные лебедки, поднимающие мусор в ведрах из кочегарок на верхнюю… … Морской словарь
По своему устройству мусорные машины разделяются на: мусорные лебедки, поднимающие мусор в ведрах из кочегарок на верхнюю… … Морской словарьГрузоподъемные приспособления для погрузчиков – Склад и техника
Стальные руки машин (Часть 1)
Л. Цинцевич
Хороший плотник знает, что разные работы даже с таким простым, на первый взгляд, материалом, как дерево, выполняются разным инструментом. То же можно сказать и о захватных приспособлениях, которые используют для обработки грузов на такой технике многофункционального применения, как вилочные погрузчики. Самым распространенным и традиционным рабочим органом для них на протяжении десятков лет остаются вилы для захвата поддонов, однако они далеко не всегда могут быть наилучшим техническим решением в конкретных условиях применения. Более того, можно привести целый перечень грузов, для обработки которых вилы при всем желании использовать либо невозможно, либо опасно. При отсутствии необходимого оборудования или специальных механизмов их приходится обрабатывать вручную.
Более того, можно привести целый перечень грузов, для обработки которых вилы при всем желании использовать либо невозможно, либо опасно. При отсутствии необходимого оборудования или специальных механизмов их приходится обрабатывать вручную.
Чтобы достичь более высокой производительности, уменьшить ущерб для перегружаемых и транспортируемых изделий и снизить число случаев травматизма водителей погрузчиков и рабочих, занятых на вспомогательных операциях, для многих грузов требуются иные, чем вилы, захватные приспособления. Даже если выбор пал на напольное погрузочное оборудование в стандартной комплектации, то, дополнив ее каретками бокового сдвига или позиционирования вил, в большинстве случаев можно значительно облегчить и упростить обработку груза, а значит, увеличить ее эффективность. Именно эта задача является первоочередной для многих компаний, занятых складским бизнесом.
В настоящее время наибольшее распространение получили сменные навесные рабочие органы, преимущество которых в том, что их можно закрепить на плите каретки грузоподъемной мачты напольного транспорта несколькими движениями рук за считанные минуты и так же быстро демонтировать, благодаря чему напольное транспортное оборудование становится еще более универсальным.
Сегодня достаточно обширный спектр сменных рабочих органов выпускают многие производители. В нашей стране наиболее известно оборудование компаний из Германии (Kaup, Cascade, Meyer), а также изделия итальянской фирмы Bolzoni Auramo. Самые популярные грузоподъемные приспособления одного типа у всех производителей имеют примерно одинаковую конструкцию — это в основном либо чисто механические устройства, либо (при наличии движущихся частей) устройства, оснащенные гидравлическим приводом от двигателя погрузчика.
В настоящее время насчитывается в общей сложности более 40 наименований только серийно выпускаемых навесных устройств, обеспечивающих не только механизацию транспортировки и погрузки грузов в упаковке и таре самых разных форм, но и целого ряда других вспомогательных операций. Каждый год появляются новые модели, которые расширяют область применения моторизованного напольного транспорта с устройством подъема, в особенности вилочных погрузчиков. Совершенствуются уже выпускающиеся изделия. Навесные устройства можно использовать при перегрузке грузов на поддонах (механизмы бокового сдвига и др.), штучных грузов без поддонов, в том числе жидкостей в разной таре (захваты), или сыпучих грузов (ковши).
У многих сменных органов есть собственный гидравлический привод, который подсоединяется к гидравлической системе напольного транспортного оборудования через быстроразъемные соединительные узлы. Грузозахватные приспособления, которые обычно не снимаются с погрузчика, часто напрямую соединены с его гидравлической системой (без быстроразъемного соединения), чтобы исключалось дросселирование в соединении (в гидравлических устройствах с большим объемом рабочей жидкости наличие быстроразъемных соединений особенно часто приводит к сильному нагреву масла). Информация о гидравлических шлангах и фильтрах и размерах подсоединения для впаиваемых фильтров слива содержится в стандарте DIN-24550-5 (1998-08).
Конечно, навесные сменные устройства представляют больший интерес для владельцев погрузчиков. Условно их можно разделить на рабочие органы, непосредственно обеспечивающие захват груза или соприкасающиеся с ним, и вспомогательные механизмы, которые позволяют значительно расширить функциональные возможности рабочих органов.
Ниже мы хотим представить самые популярные грузоподъемные приспособления с гидравлическим приводом, которые применяют на противовесных погрузчиках для обработки паллетированных и иных грузов. В последующих статьях мы расскажем о механических навесных приспособлениях, а также некоторых специализированных рабочих органах. Начнем с механизмов, которые придают вилам и другим захватам большие функциональные возможности.
Вспомогательные устройства
Каретка бокового сдвига вил, или, как ее часто называют специалисты, сайдшифтер (от англ. названия Side shifter) — наиболее часто применяемое на напольном транспортном оборудовании гидравлическое навесное устройство. На некоторых моделях погрузчиков с противовесом (обычно большой грузоподъемности), а также на большинстве моделей погрузочной техники, с помощью которой требуется точно устанавливать груз в стеллажную ячейку на больших высотах подъема (до 9…11 м), — ричстакерах, других высотных штабелерах и погрузчиках с шарнирно-сочлененным грузоподъемником — она входит в базовую комплектацию. Этот механизм позволяет позиционировать груз (принимать или опускать в ячейку стеллажа или на штабель) буквально с точностью до миллиметра благодаря боковому сдвигу зубцов вил, который осуществляется с помощью гидравлики. Тем самым повышается производительность и снижается вероятность повреждения поддонов и грузов, а также увеличивается ресурс самой машины, поскольку ей приходится выполнять меньше операций. Уменьшается и энергопотребление. Стандартной считается величина сдвига вил до 100 мм в каждую сторону, но многие компании выпускают устройства с большим расстоянием сдвига.
Например, известная немецкая компания Kaup производит серийно устройства с максимальной величиной сдвига 125 мм (для класса 3 по ISO) и 160 мм (для класса 4 по ISO). Эта фирма для случаев применения, когда необходимо еще больше увеличить поперечное перемещение, в частности, для загрузки грузов на поддонах в универсальные грузовые контейнеры, где мало места для маневрирования погрузчика, предлагает специальные варианты исполнения сайдшифтера.
Существуют одиночные и групповые механизмы бокового сдвига. Одиночный механизм бокового сдвига позволяет сдвигать оба зубца вил синхронно на одно расстояние или по отдельности вправо или влево. В случае двойных и тройных механизмов бокового сдвига, которые служат для одновременного приема двух или даже трех расположенных рядом поддонов, пары зубцов смещаются в стороны независимо друг от друга, причем одна пара зубцов вил может быть закреплена неподвижно. Групповые механизмы бокового сдвига часто применяют в таких отраслях промышленности, как производство напитков и строительных материалов. Одиночные механизмы бокового сдвига могут быть выполнены в двух вариантах: как и любое другое навесное гидравлическое устройство, они крепятся на плите навески вил напольного транспортного оборудования или интегрированы в мачту. Оба варианта имеют свои преимущества и недостатки. Интегрированная каретка не так сильно выступает за контур напольного транспортного средства, как сменная, и в меньшей мере снижает остаточную грузоподъемность, поэтому для оборудования номинальной грузоподъемностью (г/п) свыше 4000 кг, как правило, применяют интегрированные механизмы бокового сдвига. Если навесное устройство вилочного погрузчика г/п менее 6300 кг имеет боковой сдвиг в одну сторону больше 100 мм, а у оборудования г/ п свыше 6300 кг — больше 150 мм, то в этом случае необходимо провести дополнительные испытания на устойчивость по схеме нагружения заданным внецентренным грузом (см. стандарты DIN EN I726-1, издание 1999-11, приложения J и L).
Устройство поворота каретки служит для поворота захваченного груза на определенный угол (или его вращения) в вертикальной плоскости, что часто бывает необходимо, например, для того, чтобы вылить жидкость или высыпать сыпучие материалы из емкости, опрокинуть груз или поставить его из горизонтального в вертикальное положение. Угол поворота устройств может быть ограничен значениями 45°, 60°, 120°, 180°, 240°, 360° (вращение). В простейшем исполнении механизмы поворота кареток комплектуют узлами крепления вил и вильчатыми пальцами, но гораздо чаще их комбинируют с другими рабочими органами, обеспечивающими непосредственный захват, чаще всего зажимами и зажимными вилами; иногда их конструируют и предлагают вместе со встроенным механизмом бокового сдвига. Нередко на поворотных каретках крепят также штыри и завалочные органы (бочки, ковши для жидкого металла). Они серийно выполняются с рядом отверстий вдоль всей нижней плиты узла крепления вил, что позволяет реализовать любое необходимое расстояние между вилами. Надежное стопорение вил любой ширины в области сгиба обеспечивают эксцентрически просверленные квадратные упорные колодки, входящие в комплект поставки.
Часто эти устройства используют в захватах, которые обеспечивают транспортировку мусорных баков или контейнеров, в которых хранят и перевозят большие объемы мелких изделий. Как только погрузчик доставил мусорное ведро к месту назначения, поворотом вращающего устройства мусор вываливают в другой бункер или в обрабатывающую станцию. Вращающие устройства также часто являются частью процесса производства, сортировки и переработки отходов плодов и овощей, используются при обработке металлолома.
Поворотные каретки могут выдерживать очень большие нагрузки. Так, самое мощное из таких известных устройств, созданное фирмой Kaup, было смонтировано на погрузчике г/п 50 т.
Каретка регулировки положения зубцов вил (позиционер). Исторически сложилось так, что в современной практике складирования используется несколько типов поддонов. Самые распространенные имеют примерно одинаковую конструкцию, но разные габаритные размеры. Кроме того, погрузчикам часто требуется обрабатывать одинаковые поддоны с разных сторон, но, как известно, длина и ширина поддонов значительно различаются, а значит, оператору погрузчика время от времени требуется менять расстояние между вилами. Если делать это вручную, то водителю придется выйти из кабины и потратить лишнее время на перевешивание вил перед каждой погрузочной операцией с поддоном иного типа или надо будет использовать разную погрузочную технику. Решить эту проблему позволяет навесное приспособление, названное позиционером вил (Fork positioner). Это устройство автоматически с помощью гидравлики изменяет (уменьшает или увеличивает) расстояние между вилами, и оператор может работать с поддонами разных размеров, не покидая рабочее место. Пользуясь этим устройством и раздвигая вилы на максимальное расстояние, можно транспортировать длинномерные материалы. Если же сдвинуть вилы вместе вплотную, то они смогут выполнять функцию штыревого захвата для рулонов из металла или других материалов.
Существуют варианты исполнения позиционера, когда одновременно перемещаются оба зубца вил или только один зубец. Устройство регулировки положения вил может комбинироваться с устройством бокового сдвига. Надо иметь в виду, что в отличие от зажимных вил устройство регулировки положения вил непригодно для зажима грузов: у него малое усилие зажима и большая скорость перемещения вил.
Устройство выдвижения захвата обычно имеет пантографную (ножничную) конструкцию и служит для перемещения рабочего органа, чаще всего вил (см. раздел «Выдвижные вилы») или зажима, вперед-назад. Это устройство как интегрированное совместно с вилами применяется на стандартных ричтраках и штабелерах, выпускаемых американскими производителями (Hyster, Crown) для потребителей в США. При использовании его на вилочных противовесных погрузчиках надо помнить, что оно значительно снижает остаточную грузоподъемность машины.
Рабочие органы, использующие вилы
Наибольшей популярностью пользуется оборудование, которое обеспечивает погрузочной технике большую универсальность в использовании и сокращает время выполнения операций.
Зажимные вилы по конструкции аналогичны описанному выше позиционеру, т. е. с помощью гидравлики обеспечивается сдвиг и раздвижение вил. Зажимные вилы отличаются от устройства позиционирования вил только величиной усилия зажима, которое у них больше, и замедленным перемещением вил. Поэтому они пригодны не только для работы с поддонами, но и для захвата штучных грузов. В этом случае на зубцы вил обычно должны быть надеты и закреплены специальные зажимы — плоские или округлые в зависимости от грузов, для захвата которых они предназначены. При продолжительной транспортировке груза запорные клапаны обеспечивают постоянное рабочее давление в гидравлике этого захвата; при перевозке грузов в легко повреждаемой упаковке рекомендуется применять регулируемые клапаны давления для оптимизации усилия прижима.
Помимо стандартного исполнения выпускается также вариант, в котором вилы могут разворачиваться, а также захватные вилы для двух поддонов. Зажимные вилы могут применяться совместно с механизмами бокового сдвига, благодаря чему становится возможным более точный прием и установка груза. А в комбинации с устройством поворота они пригодны для переворачивания и опорожнения емкостей с сыпучим или жидким грузом.
Вилочные захваты для работы одновременно с несколькими поддонами (мультипаллетные вилы). С помощью этих рабочих органов погрузчики могут перемещать по несколько поддонов сразу. В последние годы широкое распространение получили конструкции с гидравлическим устройством сдвижения-раздвижения вил. Их преимуществом является возможность работы с разным числом поддонов (например, в устройстве для обработки двух поддонов две пары вил могут сдвигаться вплотную, превращаясь, таким образом, в приспособление для обработки одного поддона), а также возможность работы в более узких проездах. Обычно предлагаются модели с двумя и тремя парами вил, но существуют и конструкции для перевозки и подъема четырех и даже шести поддонов. Последний вариант есть, в частности, в ассортименте компании Cascade. Это устройство оснащено двумя парами вил длиной 2,4 м и может захватывать один, два или три ряда сдвоенных паллет с их узкой стороны. Его чаще всего используют для погрузки-разгрузки трейлеров с достаточно легкими грузами с одной стороны. Все мультипаллетные захваты применяют на операциях с относительно легкими грузами и при больших объемах их переработки, чаще всего в сферах, связанных с производством и продажей продовольствия и напитков. Это оборудование весьма эффективно при операциях с достаточно легкими грузами: производительность работ при их использовании увеличивается примерно пропорционально числу одновременно перевозимых поддонов. Мультипаллетные вилы могут комплектоваться устройством выдвижения ножничного типа (см. «Выдвижные вилы»).
Мультипаллетные вилы разных производителей
Телескопируемые вилы представляют собой вилы, которые могут выдвигаться вперед за счет встроенных внутрь гидравлических цилиндров. Они предназначены для увеличения рабочей зоны действия напольного транспорта с грузоподъемным механизмом и позволяют удвоить глубину загрузки поддонов на проходных стеллажах или складах, а также значительно сэкономить время на операции по загрузке-разгрузке автомашин с одной стороны. Телескопические вилы могут быть выполнены как навесное (сменное) рабочее оборудование или быть интегрированными в погрузочную технику. В качестве навесных устройств они чаще всего применяются на фронтальных вилочных погрузчиках или штабелерах с выдвижной мачтой (например, их предлагает как опцию для своих ричтраков компания Atlet) для увеличения зоны обработки грузов спереди и по сторонам. Телескопируемыми вилами также могут комплектоваться погрузчики с боковым расположением вил и некоторые модели высотных комплектовщиков при загрузке и выгрузке поддонов в узких проездах. Для уменьшения ширины рабочих проездов целесообразно прием и установку груза производить вне рабочего проезда. Эти устройства обеспечивают технике более скоростные рабочие циклы в сравнении с поворотными и разворачиваемыми вилами со сдвигом.
Выдвижные вилы — навесное устройство, которое монтируется на плите каретки и по существу превращает противовесный фронтальный вилочный погрузчик в ричтрак, а выполняет примерно те же функции, что и телескопируемые вилы. В обычном исполнении оно представляет собой вилы, которые гидравлически сдвигаются вперед с помощью механизма ножничного или иного типа. Такое навесное устройство целесообразно применять при загрузке грузовой машины с одной стороны через всю ширину кузова. Необходимо учитывать, что при движении вил возникает значительное смещение центра тяжести груза вперед, поэтому грузоподъемность вилочного погрузчика при использовании этого рабочего органа существенно снижается. Устройства применяют в первую очередь в зонах отгрузки на складах пивоваренных заводов и в промышленности строительных материалов при погрузке грузов на поддонах во второй ряд штабеля. Существует также вариант исполнения выдвижных мультипаллетных вил. У них небольшая остаточная грузоподъемность, но это очень удобный вариант, например, для обработки сразу нескольких паллет с пустой тарой (ящиками) для бутылок.
Механическая характеристика асинхронного двигателя
Асинхронный двигатель преобразовывает электрическую энергию в механическую. Механическая характеристика асинхронного двигателя, электромеханическая и другие содержат информацию, без которой невозможна его правильная эксплуатация.
Эта конструкция достаточно широко применяется в различных сферах человеческой жизнедеятельности. Без них немыслима работа станков, транспортеров, подъемно-транспортных машин. Двигатели, обладающие небольшой мощностью, широко используются в автоматике.
ОГЛАВЛЕНИЕ
Устройство асинхронной машины
Схематичное устройство асинхронной машины
Классическая асинхронная машина состоит из 2 основных частей: ротора (подвижной) и статора (неподвижной). Три отдельные фазы составляют обмотку статора. С1, С2 и С3 — обозначения начала фаз. С3, С4 и С5 — соответственно концы фаз. Все они подсоединены к клеммному разъему по схеме звезда или треугольник, что показано на рисунках а, б, в. Схему выбирают учитывая паспортные данные двигателя и сетевое напряжение.
Статор создает внутри электродвигателя магнитное поле, которое постоянно вращается.
Ротор различают короткозамкнутый и фазный.
В короткозамкнутом скорость вращения не регулируется. Конструкция с ним проще и дешевле. Однако пусковой момент у него слишком мал по сравнению с машинами, у которых фазный ротор. Здесь скорость вращения регулируется за счет возможности ввода дополнительного сопротивления.
Принцип работы асинхронной машины
Подавая напряжение на обмотку статора, по каждой фазе можно наблюдать изменяющиеся магнитные потоки, которые по отношению друг к другу смещены на 120 градусов. Общий результирующий поток получается вращающимся и создает ЭДС внутри проводников ротора.
Там появляется ток, который во взаимодействии с результирующим потоком создает пусковой момент. Это приводит к вращению ротора.
Возникает скольжение S, т. е. разность между частотой вращения самого ротора n2 и частотой магнитного поля статора n1. Первоначально оно равно 1. Впоследствии частота возрастает, разность n1 – n2 уменьшается. Это ведет к уменьшению вращающего момента.
На холостом ходу скольжение минимально. Оно достигает критического значения Sкр, когда увеличивается статический момент. Превышение Sкр ведет к нестабильной работе машины.
Механическая характеристика
Как основная, помогает проводить детальный анализ работы электродвигателя. Она выражает непосредственную зависимость частоты вращения самого ротора от электромагнитного момента n=f (M).
Из графика видно, что на участке 1-3 машина работает устойчиво. 3-4 — непосредственный отрезок неустойчивой работы. Идеальный холостой ход соответствует точке 1.
Точка 2 — номинальный режим работы. Точка 3 — частота вращения достигла критического значения. Пусковой момент Мпуск — точка 4.
Наши читатели рекомендуют! Для экономии на платежах за электроэнергию наши читатели советуют ‘Экономитель энергии Electricity Saving Box’. Ежемесячные платежи станут на 30-50% меньше, чем были до использования экономителя. Он убирает реактивную составляющую из сети, в результате чего снижается нагрузка и, как следствие, ток потребления. Электроприборы потребляют меньше электроэнергии, снижаются затраты на ее оплату.
Существуют технические способы расчетов и построения механической характеристики с учетом данных паспорта.
В первоначальной точке 1 n0=60f/p (p – количество пар полюсов). Поскольку nн и Mн непосредственно координаты точки 2, расчет номинального момента производится по формуле Mн=9,55*Рн/ nн, где Рн — номинальная мощность. Значение nн указано в паспорте двигателя. В точке 3 Mкр=Mнλ. Пусковой момент в точке 4 Mпуск=Mн*λпуск (значения λ, λпуск — из паспорта).
Механическая характеристика, построенная таким образом, называется естественной. Изменяя другие параметры можно получить искусственную механическую характеристику.
Полученные результаты дают возможность проанализировать и согласовать механические свойства самого двигателя и рабочего механизма.
Электромеханическая характеристика
Она являет собой зависимость угловой скорости вращения от тока статора. Используя несколько опорных точек можно построить электромеханическую характеристику. Номинальный ток рассчитывается по формуле:
Ток холостого хода составляет 30—40% от номинального.
Формула расчета при критическом скольжении:
Ток в начальный момент пуска:
Все значения отражают электромеханическую характеристику.
Рабочие характеристики
Рабочие характеристики асинхронного электродвигателя — это взаимосвязь нескольких параметров от полезной мощности P2. В их число входят: частота вращения самого ротора n2, момент на валу М, скольжение S, ток статора I1, расходуемая мощность P, коэффициент мощности СОSφ и КПД.
Причем частота электрического тока и напряжение неизменны, в отличие от нагрузки.
Как правило, рабочие характеристики асинхронного двигателя строятся в диапазоне значений скольжения от 0 до значения, превышающего номинальное на 10%. Это зона, где машина работает устойчиво.
Частота вращения ротора n2 уменьшается при возрастании нагрузки на валу. Но эти изменения не превышают 5%. Ток I1 растет, поскольку при последующем увеличении нагрузки его активная составляющая превышает реактивную.
СОSφ при холостом ходе мал. Но затем он возрастает. При повышенных нагрузках СОSφ уменьшается из-за возрастающего внутри обмотки ротора реактивного сопротивления.
КПД холостого хода равен 0. С увеличением нагрузки наблюдается его резкий рост, а впоследствии, снижение.
6 Простых машин: облегчение работы
На протяжении всей истории люди разработали несколько устройств, облегчающих работу. Наиболее известные из них известны как «шесть простых механизмов»: колесо и ось, рычаг, наклонная плоскость, шкив, винт и клин, хотя последние три на самом деле являются просто продолжениями или комбинациями первых. три.
Поскольку работа определяется как сила, действующая на объект в направлении движения, машина облегчает выполнение работы, выполняя одну или несколько из следующих функций, согласно лаборатории Джефферсона:
- передача силы из одного места в другое. другой,
- , изменяющий направление силы,
- , увеличивающий величину силы, или
- , увеличивающий расстояние или скорость силы.
Простые машины — это устройства без движущихся частей или с очень небольшим количеством движущихся частей, которые облегчают работу. По данным Университета Колорадо в Боулдере, многие из современных сложных инструментов представляют собой просто комбинации или более сложные формы шести простых машин. Например, мы можем прикрепить длинную ручку к древку, чтобы сделать лебедку, или использовать блок и снасть, чтобы подтянуть груз вверх по пандусу. Хотя эти машины могут показаться простыми, они продолжают предоставлять нам средства для выполнения многих вещей, которые мы никогда бы не смогли сделать без них.
Колесо и ось
Колесо считается одним из самых значительных изобретений в мировой истории. «До изобретения колеса в 3500 г. до н.э. люди были сильно ограничены в том, сколько вещей мы могли перевозить по суше и на какое расстояние», — написала Натали Вулховер в статье «10 лучших изобретений, изменивших мир». «Колесные тележки облегчили сельское хозяйство и торговлю, позволив перевозить товары на рынки и с рынков, а также облегчить бремя людей, путешествующих на большие расстояния.«
Колесо значительно снижает трение, возникающее при перемещении объекта по поверхности.» Если вы поместите картотечный шкаф на небольшую тележку с колесами, вы можете значительно уменьшить силу, необходимую для перемещения шкафа с постоянной скоростью. , «по данным Университета Теннесси.
В его книге» Древняя наука: предыстория-н.э. 500 »(Гарет Стивенс, 2010 г.) Чарли Сэмюэлс пишет:« В некоторых частях мира тяжелые предметы, такие как камни и лодки, перемещались с помощью бревенчатых катков.По мере того, как объект двигался вперед, катки снимались сзади и заменялись спереди ». Это был первый шаг в развитии колеса.
Однако большим нововведением была установка колеса на оси. прикреплен к оси, которая поддерживалась подшипником, или его можно было заставить свободно вращаться вокруг оси. Это привело к развитию повозок, повозок и колесниц. По словам Самуэльса, археологи использовали развитие колеса, которое вращается на ось как показатель относительно развитой цивилизации.Самые ранние свидетельства существования колес на осях относятся к 3200 г. до н. Э. Шумеры. Китайцы самостоятельно изобрели колесо в 2800 году до нашей эры. [По теме: Почему так долго изобреталось колесо]
Множители силы
Согласно Science Quest от Wiley, помимо уменьшения трения, колесо и ось могут также служить в качестве множителя силы. Если колесо прикреплено к оси, и для поворота колеса используется сила, вращающая сила или крутящий момент на оси намного больше, чем сила, приложенная к ободу колеса.В качестве альтернативы, к оси можно прикрепить длинную ручку для достижения аналогичного эффекта.
Все остальные пять машин помогают людям увеличивать и / или перенаправлять силу, приложенную к объекту. В своей книге «Перемещение больших вещей» («Пора пора», 2009) Джанет Л. Колоднер и ее соавторы пишут: «Машины обеспечивают механическое преимущество, помогающее перемещать объекты. Механическое преимущество — это компромисс между силой и расстоянием. » В следующем обсуждении простых механизмов, которые увеличивают силу, прилагаемую к их входу, мы пренебрегаем силой трения, потому что в большинстве этих случаев сила трения очень мала по сравнению с задействованными входными и выходными силами.
Когда сила действует на расстоянии, она производит работу. Математически это выражается как W = F × D. Например, чтобы поднять объект, мы должны выполнить работу, чтобы преодолеть силу тяжести и переместить объект вверх. Чтобы поднять объект, который вдвое тяжелее, требуется в два раза больше работы, чтобы поднять его на такое же расстояние. Также требуется в два раза больше работы, чтобы поднять один и тот же объект вдвое дальше. Как показывает математика, главное преимущество машин заключается в том, что они позволяют нам выполнять такой же объем работы, прикладывая меньшее количество силы на большее расстояние.
Качели — это пример рычага. Это длинная балка, балансирующая на шарнире. (Изображение предоставлено: BestPhotoStudio Shutterstock)Рычаг
«Дайте мне рычаг и место, чтобы встать, и я переверну мир». Это хвастливое заявление приписывается греческому философу, математику и изобретателю III века Архимеду. Хотя это может быть немного преувеличением, это выражает силу рычагов, которые, по крайней мере, образно, движут миром.
Гений Архимеда заключался в том, чтобы понять, что для того, чтобы выполнить ту же работу, можно найти компромисс между силой и расстоянием, используя рычаг.Его Закон рычага гласит: «Величины находятся в равновесии на расстояниях, обратно пропорциональных их весу», согласно «Архимеду в 21 веке», виртуальной книге Криса Рорреса из Нью-Йоркского университета.
Рычаг состоит из длинной балки и точки опоры или оси. Механическое преимущество рычага зависит от соотношения длин балки по обе стороны от точки опоры.
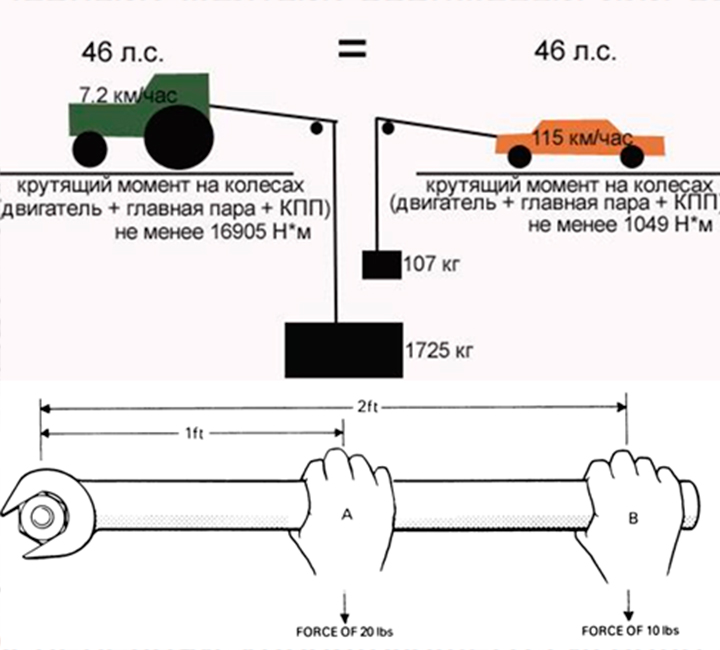
Например, мы хотим поднять 100 фунтов. (45 кг) вес 2 фута (61 см) от земли.Мы можем потянуть 100 фунтов. силы на вес в восходящем направлении на расстояние 2 фута, и мы проделали 200 фунт-футов (271 Ньютон-метр) работы. Однако, если бы мы использовали рычаг длиной 30 футов (9 м) с одним концом под грузом и точкой опоры длиной 1 фут (30,5 см), расположенной под балкой на расстоянии 10 футов (3 м) от груза, у нас было бы только надавить на другой конец с 50 фунтами. (23 кг) силы для подъема груза. Однако нам придется нажать на конец рычага на 4 фута (1,2 м), чтобы поднять груз на 2 фута.Мы пошли на компромисс, в котором мы удвоили расстояние, на которое мы должны были переместить рычаг, но уменьшили необходимое усилие вдвое, чтобы проделать тот же объем работы.
Наклонная плоскость
Наклонная плоскость — это просто плоская поверхность, поднятая под углом, как пандус. По словам Боба Уильямса, профессора кафедры машиностроения Инженерно-технологического колледжа Русса Университета Огайо, наклонная плоскость — это способ поднять груз, который был бы слишком тяжелым для подъема прямо вверх.Угол (крутизна наклонной плоскости) определяет, сколько усилий нужно для подъема груза. Чем круче пандус, тем больше усилий требуется. Это означает, что если мы поднимем наши 100 фунтов. вес 2 фута, скатывая его по 4-футовой рампе, мы уменьшаем необходимую силу вдвое, увеличивая вдвое расстояние, на которое он должен перемещаться. Если бы мы использовали рампу высотой 8 футов (2,4 м), мы смогли бы уменьшить необходимую силу до 25 фунтов. (11,3 кг).
Шкив
Если мы хотим поднять те же 100 фунтов. груз с веревкой, мы могли прикрепить шкив к балке над грузом.Это позволило бы нам тянуть веревку вниз, а не вверх, но для этого все равно требуется 100 фунтов. силы. Однако, если бы мы использовали два шкива — один прикреплен к верхней балке, а другой — к грузу, — и мы должны были бы прикрепить один конец веревки к балке, пропустить его через шкив на балке, а затем через шкив на балке, нам нужно будет только натянуть веревку с 50 фунтами. силы, чтобы поднять вес, хотя нам придется тянуть веревку на 4 фута, чтобы поднять вес на 2 фута.Опять же, мы заменили увеличенное расстояние уменьшенной силой.
Если мы хотим использовать еще меньшую силу на еще большем расстоянии, мы можем использовать блок и захват. Согласно материалам курса Университета Южной Каролины, «блок и захват — это комбинация шкивов, которая снижает количество силы, необходимой для подъема чего-либо. Компромисс заключается в том, что для блока и захвата требуется более длинная веревка. переместить что-то на такое же расстояние «.
Какими бы простыми ни были шкивы, они все еще находят применение в самых современных новых машинах.Например, Hangprinter, 3D-принтер, который может создавать объекты размером с мебель, использует систему проводов и управляемых компьютером шкивов, прикрепленных к стенам, полу и потолку.
Винт
«Винт — это, по сути, длинная наклонная плоскость, обернутая вокруг вала, поэтому его механическое преимущество может быть достигнуто так же, как и наклон», — говорится на сайте HyperPhysics, созданном Государственным университетом Джорджии. Во многих устройствах используются винты для приложения силы, намного превышающей силу, используемую для поворота винта.К таким устройствам относятся настольные тиски и гайки на автомобильных колесах. Они получают механическое преимущество не только за счет самого винта, но также, во многих случаях, за счет использования длинной рукоятки, используемой для поворота винта.
Клин
По данным Горно-технологического института Нью-Мексико, «клинья перемещают наклонные плоскости, которые двигаются под нагрузкой для подъема или в груз для разделения или разделения». Более длинный и тонкий клин дает больше механических преимуществ, чем более короткий и широкий клин, но клин делает кое-что еще: основная функция клина — изменять направление входной силы.Например, если мы хотим расколоть бревно, мы можем с большой силой вогнать клин в конец бревна с помощью кувалды, и клин перенаправит эту силу наружу, в результате чего древесина расколется. Другой пример — дверной упор, где сила, используемая, чтобы толкнуть его под край двери, передается вниз, в результате чего возникает сила трения, которая сопротивляется скольжению по полу.
Дополнительный отчет Чарльза К. Чоя, участника Live Science
Дополнительные ресурсы
- John H.Линхард, почетный профессор машиностроения и истории Хьюстонского университета, «еще раз взглянет на изобретение колеса».
- Центр науки и промышленности в Колумбусе, штат Огайо, предлагает интерактивное объяснение простых машин.
- HyperPhysics, веб-сайт, созданный Государственным университетом Джорджии, иллюстрировал объяснения шести простых машин.
Найдите забавные занятия с использованием простых машин в Музее науки и промышленности в Чикаго.
Что такое машина? Устройство, облегчающее выполнение работы за счет увеличения силы, приложенной к объекту, изменения направления приложенной силы или увеличения.
Презентация на тему: «Что такое машина? Устройство, облегчающее выполнение работы за счет увеличения силы, приложенной к объекту, изменения направления приложенной силы или увеличения». — стенограмма презентации:
1 Что такое машина? Устройство, которое упрощает выполнение работы за счет увеличения силы, приложенной к объекту, изменения направления приложенной силы или увеличения расстояния, на котором будет действовать сила.
2 Ввод и вывод работы Входной объем работы — это объем работы, выполненной на машине. Входная сила x входное расстояние Выходная работа — это объем работы, выполненной машиной. Выходное усилие x выходное расстояние Wout = Win Fout x Dout = Fin x Din 10N x 3 м = 2N x 15 м Din 15 м Dout 3 м Fin 10 N
3 Механическое преимущество Отношение выходной силы к входной.
4 Определения: Энергия: Работа = Сила: Способность выполнять работу Сила x Расстояние
Толчок или толчок
5 The 6 Simple Machines Винт, клин, наклонный плоский шкив, колесо и ось
Рычаг
6 Наклонные плоскости Наклонная плоскость — это плоская поверхность, которая расположена выше на одном конце. Наклонные плоскости облегчают перемещение предметов. Наклонная поверхность, например, пандус.Наклонная плоскость может использоваться для изменения усилия и расстояния, необходимого для выполнения работы, например, подъема грузов. Компромисс заключается в том, что объект необходимо переместить на большее расстояние, чем если бы он был поднят прямо вверх, но при этом требуется меньшая сила. Вы можете использовать эту машину, чтобы переместить объект на более низкое или более высокое место. Наклонные самолеты облегчают работу по перемещению вещей. Вам потребуется меньше энергии и усилий для перемещения объектов с наклонной плоскостью.
8 Клинья Две наклонные плоскости соединены спиной к спине.
Клинья используются для разделения вещей.
9 Рычаг первого класса Точка опоры расположена между входным и выходным усилием. Выходное усилие всегда направлено против входного усилия. Распространенными примерами первоклассных рычагов являются ломы, ножницы, плоскогубцы, ножницы для жести и качели.
11 Рычаг второго класса Выходное усилие расположено между входным усилием и точкой опоры. Выходное усилие всегда больше входного усилия. Примеры рычагов второго класса включают в себя ореховые крекеры, тачки, двери и открывалки для бутылок.
14.2 Работа и машины A______________ — это устройство, изменяющее силу. Машины заставляют работать _______________ делать. –Они изменяют величину необходимой силы,
Презентация на тему: «14.2 Работа и машины A______________ — это устройство, изменяющее силу. Машины заставляют работу _______________ делать. — Они меняют величину необходимой силы», — стенограмма презентации:
1 14.2 Работа и машины A______________ — это устройство, изменяющее силу. Машины заставляют работать _______________ делать. –Они изменяют размер необходимой силы, направление силы или расстояние, на котором действует сила. Каждое полное вращение рукоятки домкрата вызывает небольшое усилие на большом расстоянии. Небольшая сила, действующая на большом расстоянии, становится большой силой, действующей на коротком расстоянии. Каждое вращение поднимает автомобиль только на очень короткое расстояние. Машины делают работу
2 14.2 Работа и техника нарастания ______________________________________________________________ Гребец тянет весло на небольшое расстояние. — Конец весла в воде перемещается на большое расстояние. — Увеличение хода весла по воде требует от гребца приложения большей силы. Машины, которые уменьшают расстояние, на которое действует сила, увеличивают требуемую силу. Машины делают работу
3 14.2 Работа и механизмы _________________ Направление При оттягивании ручки весла назад другой конец весла перемещается в противоположном направлении.Машины могут изменять количество силы и расстояние, через которое она действует, а также направление силы. Машины делают работу
4 14.2 Работа и машины Из-за трения работа, выполняемая машиной, на _______ меньше, чем работа, выполняемая на машине. Вложенная работа в машину Сила, приложенная к машине: _____________ сила. Расстояние, через которое действует входная сила: вход _______________. Входная работа = Входная сила x Входное расстояние Входная работа и Выходная работа
5 14.2 Работа и механизмы — Весла лодки действуют как механизмы, увеличивающие расстояние, на которое действует сила — Входная сила — это сила, действующая на ручку, входное расстояние — это расстояние, на которое перемещается ручка, а входная работа — это работа, выполненная для переместите ручку. Лодка движется в этом направлении. Входное усилие Входное расстояние Выходное усилие Выходное расстояние
6 14.2 Работа и работа машин Выходная сила станка: выход ___________ Расстояние, через которое действует выходная сила: __________ расстояние Выходная мощность = Выходная сила X Выходное расстояние Входная работа и выходная работа
7 14.2 Работа и машины Производительность работы достигается за счет того, что весла отталкиваются от воды, так что вода отталкивается от них. Работа на выходе меньше работы на входе из-за трения. Все машины используют некоторую входную работу для преодоления трения. Лодка движется в этом направлении. Входное усилие Входное расстояние Выходное усилие Выходное расстояние
8 14.2 Работа и машины Единственный способ увеличить производительность — это увеличить объем работы, которую вы вкладываете в машину.Вы не можете получить больше работы от машины, чем _________! Входные и выходные данные
| A | B |
|---|---|
| составная машина | машина, состоящая из комбинации двух или более простых машин |
| эффективность | равна выходной работе, разделенной на вводная работа; выражается в процентах |
| наклонная плоскость | простая машина, которая представляет собой плоскую поверхность, наклонную поверхность или наклонную поверхность |
| входная сила | сила, приложенная к машине |
| рычаг | простой механизм, состоящий из жесткий стержень или планка, которая поворачивается или вращается вокруг фиксированной точки, называемой точкой опоры |
| механическое преимущество | количество раз, когда входная сила умножается на машину; равняется выходной силе, деленной на входную силу |
| выходную силу | силу, прилагаемую машиной |
| мощность | скорость, с которой выполняется работа; равна проделанной работе, разделенной на время, необходимое для выполнения работы |
| шкив | простая машина, сделанная из колеса с канавками, с веревкой или тросом, намотанным вокруг канавки |
| винт | простая машина, которая представляет собой наклонная плоскость, обернутая вокруг цилиндра или стойки |
| простая машина | машина, которая работает только с одним движением |
| клин | простая машина, состоящая из наклонной плоскости, которая движется; может иметь одну или две наклонные стороны |
| колесо и ось | простая машина, сделанная из двух круглых объектов разного размера, которые прикреплены и вращаются вместе |
| работа | выполняется, когда сила, приложенная к объекту, вызывает объект перемещается на некоторое расстояние |
| джоуль | единица работы в системе СИ (сила x расстояние) |
| ватт | единица мощности в системе СИ (1 джоуль в секунду) |
| лошадиных сил | равно примерно 746 ватт |
| машина | устройство, изменяющее силу |
| входное расстояние | расстояние, через которое действует входная сила |
| входная сила | сила, которую вы прикладываете к машине |
| выходная сила | с помощью машины |
| выходное расстояние | расстояние выходное усилие прилагается через | 90 147
| результат работы | работа, выполненная входной силой, действующей через входное расстояние |
| механическое преимущество | количество раз, когда машина увеличивает входную силу |
| фактическое механическое преимущество | равно соотношению выходной мощности усилие на входное усилие |
| идеальное механическое преимущество | механическое преимущество при отсутствии трения |
| КПД | процент затраченной работы, которая становится выходной мощностью |
| ось | фиксированная точка, вокруг которой вращается рычаг |
| входной рычаг | расстояние между входным усилием и точкой опоры |
| выходной рычаг | расстояние между выходным усилием и точкой опоры |
Повышение безопасности эксплуатации станков с помощью гидро-пневматики Аккумуляторы.Моделирование — Simulation
ES-7A Thermodynamics HW 5: 5-62, 81, 96, 134; 7-29, 40, 42, 67, 71, 106 Весна 2003 г. Страница 1 из 7
ES-7A hermodynamic HW 5: 5-6, 8, 96, 34; 7-9, 4, 4, 67, 7, 6 Sring 3 Страница из 7 5-6 Нагревание дано: нагревается для поддержания температуры в помещении при 3 ° C.Он нагревается до выхода со скоростью 6 кДж / ч, а
ПодробнееMECH 2110 — Статика и динамика
Глава D Решение проблемы 3 1/7/8 13:20 MECH 11 — Статическая и динамическая Глава D Решение проблемы 3 Страница 7, Инженерная механика — Динамика, 4-е издание, Мериам и Крейдж Дано: Частица движется по траектории
ПодробнееЛинейный импульс и столкновения
Глава 7 Линейный импульс и столкновение 7.1. Важная информация 7.1.1. Линейный импульс. Линейный импульс частицы с ma m, движущейся со скоростью v i, определяет p = mv. (7.1) Линейный импульс i a вектор.
Подробнее6. Трение, эксперимент и теория.
6. Трение, эксперимент и теория. Лаборатория исследует воображаемый орс и физическую интерпретацию сопутствующего орка. Мы будем использовать концепцию орка гравитации, нормального
. ПодробнееКак написать Powerline
Stragegy для Fat I / O в Degrae Moe из RAID-5 * DONG-JAE, KANG * CHANG-SOO, KIM ** BUM-JOO, SHIN * Comuter & Sytem Lab.ETRI 161 Gajeong-Dong, Yueong-Gu, Deajeon, 35-35 KOERA ** 125-1 Naei-Dong Miryang Gyeongnam
ПодробнееОсновы управления проектами
Руководство по управлению проектами Руководство по основному компоненту эффективного управления проектами и ключ к ucce 1 Содержание 1.0 Кто должен прочитать это Руководство … 3 1.1 Обзор … 3 1.2 Управление проектами
ПодробнееЭКСПЕРИМЕНТ 11 КОНСОЛИДАЦИОННЫЙ ТЕСТ
119 ЭКСПЕРИМЕНТ 11 КОНСОЛИДАЦИОННОЕ ИСПЫТАНИЕ Цель: Этот тест был проведен для определения величины и скорости уменьшения объема, которым подвергается ограниченный по бокам нефтесодержащий пецимен, когда его забрасывают на другую вертикаль
ПодробнееПолиэтиленовые (ПЭ) трубы Размеры
DEUTSCHE NORM Август 1999 г. Полиэтиленовая (ПЭ) труба Размер {8074 ICS 23.040.20 Rohre au Polyethylen (PE) PE 63, PE 80, PE 100, PE HD Maße Superede сентябрь 1987 г., издание. В соответствии с действующей практикой
ПодробнееME 24-221 ТЕРМОДИНАМИКА I
Решение дополнительной проблемы в главе 8, 9 ноября, 000, осень 000 J. Murthy ME. 4 — ГЕРМОДИНАМИКА I 8.5. Вода поступила в рабочую жидкость в тепловом двигателе с циклом Карно, где она изменилась с насыщенной жидкости на
. Подробнее2.МЕТОД СБОРА ДАННЫХ
Ключ к обучению в конкретной предметной области инженерного образования на примере электротехники Анны-Карин Картенен и Йонте Бернхард, Школа инженерии, Университет Йёнчёпинга, S-Jönköping,
ПодробнееРасчет расхода в трубе
Расчет расхода в трубе Р. Шанкар Субраманиан Отделение химической и биомолекулярной инженерии Clarkon Univerity Мы начинаем с некоторых результатов, которые мы принимаем при расчетах или расчетах, в конечном итоге
ПодробнееSCM-интеграция: организационная, управленческая и технологическая iue M.Caridi 1 and A. Sianei 2 Dipartimento di Economia e Produzione, Миланский политехнический университет, Италия Эл. Почта: [email protected] Itituto
ПодробнееПростой модульный полумост
Простой модульный полумост Шейн Колтон Электронная почта: [email protected] Maachuett Intitute of Technology Rev.1.1 13 марта 2009 г. Обзор простого модульного полумостового модуля V i V i Изолированный источник постоянного тока постоянного тока: питание от 12 В
ПодробнееБЮЛЛЕТЕНЬ ВНУТРЕННЕЙ РЕПУТАЦИИ
электронная почта @ inidetory.com.au www.inidetory.com.au +61 (2) 9299 9979 Влияние аутсорсинга на репутацию Глобальный финансовый кризис привел к дополнительным опасностям для бизнеса Autralian, чтобы затянуть пояса.
ПодробнееИмя: SID: Инструкции
CS168, осень 2014 г. Домашнее задание 1 Назначено: среда, 10 сентября 2014 г. Срок: понедельник, 22 сентября 2014 г. Имя: SID: Раздел определения (день / время): Введение — отправьте это домашнее задание с помощью Pandagrader / GradeScope (http: // www.gradecope.com/
Подробнееавтоматизация | Технология, типы, рост, история и примеры
Автоматизация , применение машин к задачам, которые когда-то выполнялись людьми, или, все чаще, к задачам, которые в противном случае были бы невозможны. Хотя термин «механизация» часто используется для обозначения простой замены человеческого труда машинами, автоматизация обычно подразумевает интеграцию машин в самоуправляемую систему.Автоматизация произвела революцию в тех областях, в которых она была внедрена, и едва ли есть какой-либо аспект современной жизни, на который она не повлияла.
Термин «автоматизация» был придуман в автомобильной промышленности примерно в 1946 году для описания более широкого использования автоматических устройств и средств управления на механизированных производственных линиях. Происхождение этого слова приписывается Д.С. Хардеру, в то время руководителю инженерного отдела Ford Motor Company. Этот термин широко используется в производственном контексте, но он также применяется вне производства в связи с множеством систем, в которых существует значительная замена человеческих усилий и интеллекта механическими, электрическими или компьютеризированными действиями.
В общем случае автоматизация может быть определена как технология, связанная с выполнением процесса посредством запрограммированных команд в сочетании с автоматическим управлением с обратной связью для обеспечения надлежащего выполнения инструкций. Полученная система способна работать без вмешательства человека. Развитие этой технологии становится все более зависимым от использования компьютеров и компьютерных технологий. Следовательно, автоматизированные системы становятся все более изощренными и сложными.Продвинутые системы представляют собой уровень возможностей и производительности, который во многих отношениях превосходит возможности людей выполнять те же действия.
Технология автоматизации достигла такой степени, что на ее основе развился ряд других технологий, получивших признание и собственный статус. Робототехника — одна из таких технологий; это специализированная отрасль автоматизации, в которой автоматизированная машина обладает определенными антропоморфными или человекоподобными характеристиками.Наиболее типичная человеческая характеристика современного промышленного робота — это его механическая рука с приводом. Рука робота может быть запрограммирована на выполнение последовательности движений для выполнения полезных задач, таких как загрузка и разгрузка деталей на производственной машине или выполнение последовательности точечной сварки на деталях из листового металла кузова автомобиля во время сборки. Как видно из этих примеров, промышленные роботы обычно используются для замены рабочих на фабриках.
Получите эксклюзивный доступ к контенту из нашего первого издания 1768 с вашей подпиской.Подпишитесь сегодняВ этой статье рассматриваются основы автоматизации, включая ее историческое развитие, принципы и теорию работы, приложения в производстве и в некоторых сферах услуг и отраслей, важных в повседневной жизни, а также влияние на человека, а также на общество в целом. В статье также рассматривается развитие и технология робототехники как важная тема автоматизации. По связанным темам см. Информатика и обработка информации.
Историческое развитие автоматизации
Технология автоматизации возникла из смежной области механизации, которая зародилась в период промышленной революции.Механизация относится к замене силы человека (или животного) механической силой той или иной формы. Движущей силой механизации была склонность человечества создавать инструменты и механические устройства. Здесь описаны некоторые важные исторические достижения в области механизации и автоматизации, ведущие к современным автоматизированным системам.
Ранние разработки
Первые орудия из камня представляли попытки доисторического человека направить свою физическую силу под контроль человеческого разума.Несомненно, тысячи лет потребовались для разработки простых механических устройств и машин, таких как колесо, рычаг и шкив, с помощью которых можно было увеличить силу человеческих мышц. Следующим шагом была разработка механических машин, для работы которых не требовалась человеческая сила. Примеры этих машин включают водяные колеса, ветряные мельницы и простые паровые устройства. Более 2000 лет назад китайцы разработали трип-молоты, приводимые в движение проточной водой и водяными колесами.Ранние греки экспериментировали с простыми реактивными двигателями, работающими от пара. Механические часы, представляющие собой довольно сложную сборку с собственным встроенным источником питания (гирькой), были разработаны около 1335 года в Европе. Ветряные мельницы с механизмами автоматического поворота парусов были разработаны в средние века в Европе и на Ближнем Востоке. Паровая машина представляла собой крупный шаг в развитии механических машин и положила начало промышленной революции. За два столетия, прошедшие с момента появления парового двигателя Ватта, были разработаны двигатели и механизмы, которые получают энергию из пара, электричества, химических, механических и ядерных источников.
Каждая новая разработка в истории механизированных машин привела к повышенным требованиям к устройствам управления, чтобы использовать мощность машины. Самые ранние паровые машины требовали, чтобы человек открывал и закрывал клапаны, сначала для впуска пара в поршневую камеру, а затем для его выпуска. Позже был разработан механизм золотникового клапана для автоматического выполнения этих функций. Тогда единственной потребностью человека-оператора было регулирование количества пара, регулирующего скорость и мощность двигателя.Это требование к человеческому вниманию при работе парового двигателя было устранено регулятором с летающим шаром. Это устройство, изобретенное Джеймсом Ваттом в Англии, представляло собой утяжеленный шар на шарнирном рычаге, механически соединенный с выходным валом двигателя. Когда скорость вращения вала увеличивалась, центробежная сила заставляла утяжеленный шар перемещаться наружу. Это движение управляло клапаном, который уменьшал количество пара, подаваемого в двигатель, тем самым замедляя двигатель. Регулятор с летающим мячом остается элегантным ранним примером системы управления с отрицательной обратной связью, в которой увеличивающийся выход системы используется для уменьшения активности системы.
Отрицательная обратная связь широко используется как средство автоматического управления для достижения постоянного рабочего уровня системы. Типичным примером системы управления с обратной связью является термостат, используемый в современных зданиях для регулирования температуры в помещении. В этом устройстве снижение температуры в помещении вызывает замыкание электрического переключателя, таким образом, включается нагревательный элемент. При повышении температуры в помещении переключатель размыкается и подача тепла отключается. Термостат можно настроить на включение нагревательного элемента при любой конкретной уставке.
Еще одним важным достижением в истории автоматизации стал жаккардовый ткацкий станок (см. Фотографию), который продемонстрировал концепцию программируемого станка. Около 1801 года французский изобретатель Жозеф-Мари Жаккар изобрел автоматический ткацкий станок, способный создавать сложные узоры на текстиле, управляя движениями множества челноков из нитей разного цвета. Выбор различных рисунков определялся программой, содержащейся в стальных картах, в которых были пробиты отверстия. Эти карты были предками бумажных карт и лент, которые управляют современными автоматами.Концепция программирования машины получила дальнейшее развитие в конце XIX века, когда Чарльз Бэббидж, английский математик, предложил сложную механическую «аналитическую машину», которая могла бы выполнять арифметические операции и обработку данных. Хотя Бэббидж так и не смог его завершить, это устройство было предшественником современного цифрового компьютера. См. Компьютеры.
Жаккардовый ткацкий станокЖаккардовый ткацкий станок, гравюра, 1874 г. В верхней части станка находится стопка перфокарт, которые будут подаваться в ткацкий станок для управления ткацким рисунком.
Как предотвратить заболевание ОРВИ у ребенка. Какие меры профилактики наиболее действенны. Что делать, если ребенок все-таки заболел ОРВИ. Какие средства помогут быстрее справиться с вирусной . . .
Какие виды бандажей для беременных бывают. Как правильно подобрать и носить бандаж во время беременности. Когда нужно начинать использовать бандаж. Какие есть показания и противопоказания . . .