Что такое AWD? — обзорная статья + видео
При выборе автомобиля типа паркетника встает вопрос о выборе привода в приобретаемой машине. Многие видели надписи на задней стороне машине в виде AWD, 2WD и 4WD. И большинство знает, что это обозначение типа привода, и останавливают свой выбор на 4WD. Но в чем сама суть этих приводов и какие в них отличия, скажет не каждый. Поэтому перед приобретением машины лучше узнать, что значит AWD, 2WD и 4WD. Будем разбираться вместе.
Описание AWD привода.
Система AWD (all wheel drive) обозначает привод на все колеса. Система заключается в том, что бортовой компьютер в зависимости от ситуации на дороге выбирает режим привода благодаря угловым скоростям каждого колеса.
Полный привод используется при проезде плохих дорог, при заносе или проскальзывании колес. Поэтому на хорошей дороге бортовой компьютер выбирает режим 2WD, т.е. привод только на два колеса, при этом при проскальзывании одного из колес компьютер сразу же подключает полный привод.
К недостаткам полного привода AWD можно отнести необходимость определения момента для подключения привода на все колеса.
Описание 4WD привода.
Система 4WD, также как и AWD, обозначает привод на все колеса, а если переводить дословно, то «привод на четыре колеса». В современных авто встречаются два вида данного привода: part-time 4WD и full-time 4WD.
В первом варианте выбор привода осуществляется самостоятельно водителем — переключением специальной раздаточной коробки. В нее входят 2WD, 4WD повышенная и 4WD пониженная. В основном водитель будет использовать только 2WD, так как 4WD лучше не использовать на сухой асфальтной дороге – это может привезти к повреждениям в механизме машины.
Недостатками такой системы можно назвать неудобство при осуществлении переключения на режим 4WD пониженную, так как для этого придется снизить скорость или вообще остановиться.
Переключение между режимами 2WD и 4WD повышенной можно делать во время движения автомобиля.
Режим полного привода пониженный предназначен для езды по песку или рыхлому снегу, а также в экстремальных ситуациях. Поэтому систему part-time 4WD выбирают водители, которые больше ездят в условиях города.
Полный привод с названием full-time 4WD является полным приводом, действующим постоянно. Данный вид привода действует вне зависимости от дорожных условий и является лучшим вариантом для водителей, ездящих по скользким дорогам или сыпучим поверхностям.
Здесь стоит отметить, что при таком постоянном полном приводе в машине является обязательной установка межосевого и межколесного дифференциалов – они нужны для обеспечения лучшей динамики и управляемости авто при езде.
Описание 2WD.
В отличие от предыдущих двух видов приводов, этот привод не на все колеса, а только на два: передние или задние. Если сравнивать обыкновенный переднеприводный автомобиль и авто с приводом 2WD, то преимущества будут однозначно у 2WD. Объясняю почему.
Объясняю почему.
У переднего привода при застревании в снегу буксует одно колесо, а второе стоит на месте, так как отсутствует блокировка дифференциала. В такой же ситуации у машины с приводом 2WD одно колесо будет буксовать, а второе на этой же оси будет продолжать работать – потому, как в 2WD ведущими являются два колеса сразу, а не одно.
Отличие AWD от 4WD.
Привод на четыре колеса (4WD и AWD) и привод только на два колеса (2WD) — это и есть главное отличие этих систем. При пробуксовывании колеса в том же рыхлом снегу в 4wd – одно колесо будет буксовать, а остальные три будут вытягивать машину. В 2wd в такой же ситуации будут работать только два колеса на одной оси, т. е. одно колесо буксует, а второе на этой же оси копает.
е. одно колесо буксует, а второе на этой же оси копает.
Что выбрать?
На первый взгляд все просто — привод на четыре колеса будет лучше привода на 2 колеса. Не спешите с выводами, ведь есть здесь несколько НО:
- выбор вида привода должен определяться местом жительства: если дорога к вашему дому — это бездорожье, то тут и думать нечего — только полный привод, а вот если вы проживаете в городе и редко выбираетесь за город и в чащу леса по плохим дорогам, то тогда лучше остановить свой выбор на 2WD;
- обслуживание полного привода обходится гораздо дороже из-за сложной конструкции и множества всяких механизмов;
- помимо дорого обслуживания полный привод приводит к большему расходу топлива, и, соответственно, из-за большей нагрузки на двигатель есть большая вероятность спровоцировать поломки, поэтому если вам нужен городской автомобиль с редкими поездками в деревню или на дачу, то смело выбирайте 2WD.
Видео
 macromedia.com/pub/shockwave/cabs/flash/swflash.cab#version=6,0,40,0″>
macromedia.com/pub/shockwave/cabs/flash/swflash.cab#version=6,0,40,0″>
Рекомендую прочитать:
Разница между AWD и 4WD: какой привод полнее?
Наверняка многие водители замечали, что у одних кроссоверов на крышках багажников красуется надпись AWD, а у других 4WD. Она обозначает тип привода, но в чём же между ними разница и что лучше?
Какие бывают типы привода?
Все современные автомобили можно разделить по типу привода на три группы. Первая группа – моноприводные, сюда входят машины с передним или задним приводом. Ко второй группе относятся полноприводные машины, это внедорожники, предназначенные для езды в местах, где нет асфальта и дорог. Третья группа — автомобили с ограниченным автоматически подключаемым полным приводом, который устанавливают в кроссоверы.
Ко второй группе относятся полноприводные машины, это внедорожники, предназначенные для езды в местах, где нет асфальта и дорог. Третья группа — автомобили с ограниченным автоматически подключаемым полным приводом, который устанавливают в кроссоверы.
Загадочные обозначения
Моноприводные автомобили имеют обозначение 2WD, что расшифровывается как «2 wheel drive» или два ведущих колеса. Это самые обыкновенные автомобили, их главная стихия — городские дороги и трассы. Несмотря на то, что некоторые легковые автомобили из-за высокого клиренса могут ездить и вне дорог, но большинство из них накрепко застрянет в первой же луже. Чтобы выбраться назад на дорогу, автомобиль приходится буквально тащить на руках. Поэтому те, кто предпочитают активный отдых вне асфальтированных дорог, предпочитают автомобили с одним из видов полного привода.
Логично предположить, что 4WD, по аналогии с моноприводными машинами, расшифровывается как «4 wheel drive» или четыре ведущих колеса. В российской традиции автомобилестроения эта надпись эквивалентна шильдику 4Х4. Этот тип полного привода также можно условно разделить на два вида:
В российской традиции автомобилестроения эта надпись эквивалентна шильдику 4Х4. Этот тип полного привода также можно условно разделить на два вида:
— с постоянным полным приводом, так называемый «Full time», это когда все четыре колеса крутятся постоянно;
— подключаемый полный привод, называемый «Part time», когда полный привод включается при необходимости вручную. Большинство внедорожников имеет именно подключаемый привод, так это позволяет существенно сэкономить на расходе топлива, повысить максимальную скорость и несколько упростить конструкцию машины.
И последний тип привода — AWD, что означает «all wheel drive» или все ведущие колёса. Казалось бы, это то же самое что и 4WD, только другими словами, но это не так. Автомобили с приводом AWD большую часть своей городской жизни переднеприводные, задняя ось у них подключается автоматически только в случае проскальзывания передних колёс, например, на мокром асфальте или в снегу. Водителям таких машин недоступны ни блокировки дифференциала, ни понижающая передача.
Фото с интернет-ресурсов
Rwd, fwd, awd, 4wd на машине — какой привод выбрать
Видя на машине давно всем привычную надпись 4 вд, все знают, это значит, что машина полноприводная. 4wd, Rwd, fwd и awd(авд), все эти надписи, которые можно встретить сзади на машине означают её привод, а механически они отличаются. Означает это что для каждого типа дороги нужен свой тип привода. Например, рвд это задний ведущий мост. На автомобиле установлен ведущий задний мост. 4wd это привод на все колёса. Мощность распределяется по осям, между двух мостов — применяется на джипах и паркетниках. AWD (Automatic Wild Drive) это система, которая имеет распределение момента на все 4 колеса, то есть никак на 4wd две оси, а задействованы все четыре колеса. Авд это машина с полным приводом, но в технологии есть значительные отличия от 4wd. Полноприводные 4вд созданы для проходимости, а авд создан для комфортного устойчивого управления при мокрой дороге и на грунтовой дороге.
Automatic Wild Drive переводится как привод на все колёса это автоматическая система, которая перераспределяет момент одновременно для всех четырех колес.
Распределяет она его по-умному, работает независимо от водителя, каждое колесо имеет множество датчиков, которые замеряют проскальзывание шин. Компьютер анализирует тип дорожного покрытия, и в зависимости от него программирует поведение каждого колеса. Специальное электронное сцепление подключает в нужный момент дифференциал заднего моста и колёса по отдельности. Программа распределяет момент по осям, или каждому колесу по отдельности. АВД это относительно новая система, которая используется в современных кроссоверах и пикапах. Программами обладают новые автомобили Infiniti FX, Subaru Forester, Land Rover, Mitsubishi Outlander. Некоторые системы автомобилей распределяют тягу 60 на 40. 60% момента идёт переднему мосту, а 40 назад. В некоторых распределение: 50 х 50 при езде с AWD.
60% момента идёт переднему мосту, а 40 назад. В некоторых распределение: 50 х 50 при езде с AWD.
Отличие АВД от 4wd
АВД это автоматически полный привод, 4ВД либо подключается механически вручную и может отключаться. Представим, что мы едем по мокрой дороге с кочками и съезжаем в просёлочную грязь, при этом машина снабжена АВД. В таких случаях работает передний привод, что экономней полного. Съезжая в грязь на 2 передних ведущих колёсах, они начинают терять сцепление и проворачиваться. Компьютер видит это и подключает задние колёса, распределяя мощность двигателя на заднюю ось, или каждому колесу по отдельности. Система 4wd распределяют мощность по двум осям. В системе АВД отсутствует пониженные передачи и нет блокировки дифференциала это два серьёзных момента, которые не позволяют автомобилю системы АВД ездить по серьёзному бездорожью – так как всё контролируется электроникой.
Плюсы и минусы АВД
- Относительно дешёвая конструкция;
- Хорошо распределённая нагрузка на двигатель;
- Автоматическое управление системы – самостоятельное распределение момента в нужный момент.
 Если прокручивается передний мост, подключается задний, или колёса по отдельности;
Если прокручивается передний мост, подключается задний, или колёса по отдельности; - Водителю больше не нужен большой опыт, чтобы ездить на АВД, за вас всё сделает автоматика тип дорожного покрытия я распознаёт компьютер;
- Машина более экономично потребляет топливо с АВД;
- Подвластны такие дороги, как песок, снег и грунт.
 Если прокручивается передний мост, подключается задний, или колёса по отдельности;
Если прокручивается передний мост, подключается задний, или колёса по отдельности;Минусы All Wheel Drive
- Отсутствие дифференциала, его блокировки и понижение передач делает систему не конкурентно способной с 4wd – серьёзное бездорожье без этих функций не покорится;
- машина оборудования системой АВД имеют меньше клиренс по сравнению с 4wd – всё дело в дополнительной электронике и сцеплении, которое установлено под машиной;
- Работа АВД зависит от качества установленной программы в компьютер, но она может совершать ошибки, подводить в дороге. Любой датчик может выйти из строя, а значит работать всё будет по-другому;
- Когда надо на дороге водитель не может влиять на электронику — нет преимущества полного привода;
- Транспортировка грузов более ограниченна из-за большого количества электроники;
- Трансмиссия менее надёжна в автомобиле системы АВД.

В большинстве случаев именно условия использования, диктуют какая машина вам нужна: с 4wd или AWD. Если вы хотите штурмовать ту дорогу, где обычные машины не ездят вам подойдёт полный привод 4вд. А если вам нужна повседневная машина, которая не требует навыков от водителя, а при лёгком бездорожье всё сделает за вас, то ABD это система для вас.
В современных машинах используется три типа привода: передний (FWD), задний (RWD) и полный (AWD). Самым распространённым стал привод на передние колёса, благодаря кроссоверам вторым по популярности стал полный привод, а замыкают рейтинг заднеприводные машины. Но чем они принципиально отличаются друг от друга и какой из них лучше?
Передний привод (FWD)
Этот тип привода получил наибольшее распространение благодаря своей простоте и дешевизне. В таких машинах нет необходимости тянуть под полом карданный вал, что увеличивает полезное пространство в салоне. Однако небольшой тоннель на полу всё же остался, без него невозможно добиться необходимой жёсткости кузова. Передний привод обладает хорошей устойчивостью на дороге и управляемостью. К недостаткам можно отнести невозможность установки достаточно мощных моторов, так как при интенсивном разгоне нагрузка переходит на заднюю ось, что приводит к отрыву передних колёс.
Передний привод обладает хорошей устойчивостью на дороге и управляемостью. К недостаткам можно отнести невозможность установки достаточно мощных моторов, так как при интенсивном разгоне нагрузка переходит на заднюю ось, что приводит к отрыву передних колёс.
Задний привод (RWD)
Этот тип привода считается классическим, но сейчас всего несколько автомобильных брендов производят машины с задним приводом. Его преимуществом является острая управляемость, не зря в соревнованиях по дрифту используют именно заднеприводные машины. Радиус разворота у таких авто заметно меньше, чем у переднеприводных собратьев. Хорошие показатели разгона получаются за счёт естественной нагрузки задней оси. Но есть и недостатки, один из них — громоздкость и большой вес этого привода. Коробка передач, кардан и задний мост занимают очень много места под автомобилем, а также прибавляют лишние килограммы к весу машины. Из-за избыточной управляемости водить автомобили на заднем приводе несколько сложнее, чем передниприводные, особенно в зимних условиях.
Полный привод (AWD)
Такой тип полного привода чаще всего используется на кроссоверах. Он позволяет обеспечить хорошую устойчивость машины на дороге при любых погодных условиях. Также с приводом на все колёса можно смело съезжать с асфальта и ездить по умеренному бездорожью. Полный привод позволяет добиться неплохой динамики разгона.
К недостаткам можно отнести большой вес трансмиссии и не самые хорошие показатели управляемости в критичных ситуациях, а также большой расход топлива.
Полный привод (4WD)
Ещё одна разновидность полного привода – это 4WD. Он имеет всё те же преимущества, что и AWD, только имеет несколько другой принцип работы. Машины с таким приводом представляют собой симбиоз переднего и заднего привода. Привод на задние колёса передаётся при помощи кардана через раздаточную коробку. Такая компоновка позволяет ездить по тяжёлому бездорожью.
Недостатком такого привода является большой вес агрегатов и шум при их работе. Управляемость у таких машина довольно посредственная. Этот тип привода не очень подходит для езды по трассе, из-за низких скоростей и большого расхода топлива.
Управляемость у таких машина довольно посредственная. Этот тип привода не очень подходит для езды по трассе, из-за низких скоростей и большого расхода топлива.
Большинство водителей догадываются, что обозначения FWD или AWD касаются автомобилей. Впрочем, лишь немногие достоверно знают, что это – привод FWD. Давайте подробнее разберемся, что означают эти понятия, в частности, в чем особенность FWD-привода, предоставляет ли он какие-либо преимущества для водителя.
Определение
С самого начала важно определиться с терминологией, так как многие водители и владельцы транспортных средств путают приводы AWD и FWD. Между тем, для четырехколесного транспорта данные термины практически означают одно и то же. Если обобщить, то AWD – это автоматически подключаемый (или постоянный) полный привод. 4WD – это также полный привод, который водитель может отключать или подключать вручную.
Отметим, что в автомобильной индустрии не всегда соблюдается эта терминология, поэтому многие покупатели часто путаются и не всегда понимают, что это – привод FWD. К примеру, автомобили Subaru Justy или Ford Tempo позиционируются на рынке как транспортные средства с AWD приводом, хотя на самом деле подключение и отключение ведущих осей осуществляется вручную.
К примеру, автомобили Subaru Justy или Ford Tempo позиционируются на рынке как транспортные средства с AWD приводом, хотя на самом деле подключение и отключение ведущих осей осуществляется вручную.
Окончательную путаницу в понятия вносит система полного привода, подключаемая в случае необходимости (on demand four wheel drive). Сложно сказать, о чем идет речь в данном случае. Подобное понятие может означать подключаемый вручную или автоматический полный привод. Ответственность за такую путаницу в большей степени несет пресса, так как именно она чаще всего допускает ошибки, публикуя автомобильные обзоры или пресс-релизы.
Тип привода FWD
Одно и то же понятие может иметь разные значения. Каждый производитель использует ту или иную аббревиатуру для определения полного или переднего привода.
Вариантов много. В частности популярными являются следующие аббревиатуры:
- AWD – All Wheel Drive. Переводится как «Все ведущие колеса».
- FWD – Full Wheel Drive. Также означает «Все ведущие колеса» или «Полный привод».
- 4WD – Four Wheel Drive. Переводится: «Четыре ведущих колеса».
 Также означает «Все ведущие колеса» или «Полный привод».
Также означает «Все ведущие колеса» или «Полный привод».Как вы уже поняли, нельзя точно сказать, что это привод FWD, поскольку для разных автомобилей это понятие может определять разные характеристики. Более того, к данной аббревиатуре могут примыкать и другие приставки. Часто можно встретить водителей или потенциальных покупателей, которые не понимают, что это привод LHD FWD. Первые три буквы расшифровываются как Left-Hand Drive, переводится обозначение «Леворульный автомобиль».
Виды FWD-систем
Есть разные виды полноприводных трансмиссий. Чаще всего можно встретить адаптивный полный привод на внедорожниках, спортивных автомобилях, кроссоверах и даже на некоторых минивэнах. Данная система способна распределять мощность мотора между задними и передними колесами при необходимости. В большинстве случаев 100% мощности передается сначала на передние колеса, однако система определяет потери сцепления с дорогой, то мощность смещается на заднюю ось. Причем не всегда мощность распределяется в пропорции 50/50.
Причем не всегда мощность распределяется в пропорции 50/50.
Подключаемый полный привод – это простейшая система в трансмиссии, которая реализована на внедорожниках типа Jeep Wrangler и российской «Нивы». Здесь есть специальная раздаточная коробка, с помощью которой можно подключить или отключить переднюю ось от трансмиссии. То есть автомобиль большую часть своего времени ездит на заднем приводе, но, когда водитель замечает потерю тяги, то он может подключить переднюю ось с помощью рычага в салоне.
Постоянный полный привод в современных автомобилях используется редко. Здесь ни водитель, ни компьютер не может подключать/отключать, или перемещать передачу крутящего момента на разные оси.
Когда FWD характеризует переднеприводные машины?
Иногда этой аббревиатурой обозначают конструкцию трансмиссии. То есть FWD (Front-wheel Drive) передний привод может обозначать в том случае, если производитель этими тремя буквами определяет тип трансмиссии, при котором крутящий момент от мотора передается на передний мост.
Следовательно, невозможно точно сказать, какой привод FWD – передний, задний или полный. Можно лишь исключить задний, но автомобиль с подобной аббревиатурой в характеристике трансмиссии может оказаться передне- либо полноприводным.
Плюсы FWD
Если предположить, что привод FWD – это возможность направить крутящий момент на все четыре колеса, то преимущества будут очевидными. В частности, это обеспечит лучшее сцепление с дорожным покрытием в непогоду или на пересеченной местности. Автомобиль лучше контролируется, он увереннее входит в крутые повороты на высоких скоростях. К тому же, машины с двумя ведущими осями более проходимые, там, где транспорт с передним приводом застрянет, полноприводная машина легко проедет.
Минусы
Недостатки также имеются. Главный из них – механическая сложность реализации подобной системы, которая влечет за собой увеличение стоимости автомобиля. Также поломка трансмиссии может обойтись гораздо дороже. Повышенный расход топлива – это еще один минус привода FWD. Что это именно так, обладатели подобных машин не сомневаются. Да и производители в характеристиках этого не скрывают. Часто в технических параметрах к транспорту можно заметить, что расход топлива в полноприводной машине больше в среднем на 2-3 литра на 100 км. Однако это справедливая плата за лучшую проходимость, сцепление с дорогой и управляемость.
Что это именно так, обладатели подобных машин не сомневаются. Да и производители в характеристиках этого не скрывают. Часто в технических параметрах к транспорту можно заметить, что расход топлива в полноприводной машине больше в среднем на 2-3 литра на 100 км. Однако это справедливая плата за лучшую проходимость, сцепление с дорогой и управляемость.
Что лучше?
Многие автомобили (в том числе небольшие джипы и кроссоверы) оснащаются только передним приводом. Подобный выбор подойдет для водителей, которые совершают поездки по городу, но редко выезжают за его пределы. Однако даже за пределами города чаще всего приходится передвигаться по ровным трассам, но иногда, конечно, имеют место ямы и некачественное дорожное покрытие. С этим передне- или заднеприводные машины легко справляются.
Полноприводные автомобили ориентированы на движение по бездорожью, грязи и ямам. С этим они неплохо справляются, но даже хорошие машины с надежной системой подвески и трансмиссией из-за больших нагрузок могут ломаться. Нередко пользователи пытаются найти на Pontiac Vibe 2003 FWD передний левый привод или другие запчасти для машин других марок. Что касается спортивных автомобилей, то там полный привод чаще всего вообще не нужен. Не просто так ведущие разработчики спорткаров делают ведущей заднюю ось.
Нередко пользователи пытаются найти на Pontiac Vibe 2003 FWD передний левый привод или другие запчасти для машин других марок. Что касается спортивных автомобилей, то там полный привод чаще всего вообще не нужен. Не просто так ведущие разработчики спорткаров делают ведущей заднюю ось.
Выбор должен зависеть от региона, в котором проживает водитель. К примеру, если он живет на севере, где большую часть года на дорогах лежит снег, то лучше подобрать полноприводный автомобиль, так как у него сцепление с дорогой будет лучше. Это обеспечит не только комфорт при езде, но и большую безопасность за счет улучшения управляемости. Однако стоит учесть, что на сухой дороге ощутимой разницы в управлении между одно- и полноприводным автомобилем не заметить. Это хорошо видно только на скользкой дороге, при движении по пересеченной местности.
Следовательно, в городских условиях привод на передние колеса Front Wheel Drive (FWD) оправдан больше. Незачем «палить» лишние литры топлива, но это справедливо до тех пор, пока машина находится в городе и ездит в умеренном режиме.
Впрочем, есть и противоположное мнение. Любители полноприводных машин часто указывают на то, что их управляемость лучше. С этим не поспоришь. Следовательно, такие автомобили лучше входят в повороты и делают данный процесс более предсказуемым. При этом водитель машины будет чувствовать себя комфортно и уверенно за рулем. Можно даже меньше снижать скорость перед поворотом, что позволит сохранять энергию, и приведет к меньшим потерям крутящего момента на очередное ускорение. Отсюда в теории возможна экономия топлива. Но эти возможности рассматриваются редко. Многие водители ассоциируют полный привод с надежностью. Такие авто быстро начинают движение, разгоняются без пробуксовок.
В заключение
Большинство автомобилей среднего ценового сегмента имеют передний привод. Такие машины сохраняют идеальный баланс между хорошей управляемостью и ценой, поэтому и пользуются большой популярностью.
Итак, теперь вы понимаете, что означает три буквы в характеристиках автомобиля. К сожалению, без разъяснения самого производителя автомобиля, они могут означать, что угодно. Учитывайте это при выборе автомобиля, уточняйте детали у продавца.
К сожалению, без разъяснения самого производителя автомобиля, они могут означать, что угодно. Учитывайте это при выборе автомобиля, уточняйте детали у продавца.
Передний привод или FWD (Front Wheel Drive) — конструкция трансмиссии автомобиля, при которой крутящий момент передается на передние колеса. Впервые эта трансмиссия была применена в 1929 году на Cord L29, а в 70-е годы распространилась на массовый сегмент машин из-за дешевизны конструкции.
Переднеприводные автомобили считаются более безопасными для водителя в подавляющем большинстве условий, так как обладают стабильными показателями устойчивости и управляемости.
В то время как автомобили с задним приводом требуют от водителя большей аккуратности и навыков вождения на скользких покрытиях.
Переднеприводная компоновка является наиболее совершенной с точки зрения эффективного использования пространства в салоне. Массовые бренды используют для своих бюджетных марок исключительно передний привод, позволяющий делать авто компактными при необходимости, а также максимально вместительными. Пол под ногами ровный благодаря отсутствию в нем тоннеля для КПП и карданного вала.
Пол под ногами ровный благодаря отсутствию в нем тоннеля для КПП и карданного вала.
Самые известные примеры переднеприводного автомобиля — Лада Веста, Тойота Королла.
Задний привод или RWD (Rear Wheel Drive) — конструкция трансмиссии автомобиля, при которой крутящий момент передается на задние колеса. Изначально практически все автомобили были заднеприводными, так как использовался цепной привод передачи крутящего момента, аналогичный велосипедному.
Основным отличием заднего привода от переднего можно назвать динамическую загрузку задней (ведущей) оси. При ускорении задняя ось загружается, следовательно обеспечивается лучшее сцепление ведущих колес с дорожным покрытием. Именно поэтому подавляющее большинство спортивных автомобилей используют данную компоновку. Привод на заднюю ось, помимо прочего, позволяет опытному водителю вести автомобиль в управляемом контролируемом заносе. Данный прием эффективно используется в профессиональных автоспортивных дисциплинах, таких, как ралли и дрифт.
Большинство автопроизводителей люксовых марок не сильно переживают за их компактность и отдают дань традициям, по сей день используя заднеприводную компоновку ради лучшей развесовки и управляемости.
Например, БМВ продолжает выпускать свои самые популярные 3, 5 и 7 серии в версиях с задним приводом. Но и этот бренд настигают ужесточающиеся с каждым годом нормы безопасности и экологии: в результате, новая БМВ 1 серии (F40) построена на переднеприводной платформе, а последнее поколение легендарной M5 (F90) — полноприводное, с возможностью отключать переднюю ось (Drift Mode).
На сегодняшний день можно выделить три основные схемы полного привода:
- подключаемый (Suzuki Jimny, Ford Ranger)
- автоматически подключаемый (Nissan Qashqai, Kia Sportage)
- постоянный (Lada 4×4 (ВАЗ 2121 Нива), Audi A6 Allroad Quattro).
Итак, какой же тип привода лучше? Постараюсь ответить. Если вы используете автомобиль для каждодневных поездок по хорошему дорожному покрытию с редкими поездками за город — переднеприводный автомобиль станет для вас лучшим выбором из-за простоты конструкции, экономичности и изначально низкой стоимости.
Полноприводный автомобиль с увеличенным клиренсом имеет смысл покупать, если вы, например, живете за городом, любите активный отдых, подразумевающий вылазки в труднопроходимые места, или просто хотите чувствовать себя увереннее на заснеженных улицах зимой.
Если же вы любите получать настоящее удовольствие от вождения в целом и прохождения поворотов в частности, вам непременно стоит попробовать автомобиль с заднеприводной компоновкой, который точно не даст вам заскучать как летом, так и зимой.
Делитесь мнением:
Вам также понравится:
Чтобы стать автором нашего блога, нужно классно писать, а также разбираться в автомобилях на экспертном уровне. И то, и другое можно нам продемонстрировать, выполнив тестовое задание.
Задание: Написать предварительный обзор авто, которое выйдет на российский рынок в ближайшие несколько месяцев. Модель можно выбрать из календаря автоновинок. Свой выбор нужно согласовать с нами. Для этого напишите в форму ниже и сообщите, о какой машине хотите написать (лучше предложить сразу несколько), а мы примем решение и вышлем вам ТЗ на обзор.
Важно: если у вас есть возможность самостоятельно брать авто на тест-драйв — обязательно напишите об этом!
Если ваш обзор нам понравится, мы опубликуем его в блоге, заплатим вам гонорар (2000 р.) и начнём постоянное сотрудничество. Если текст понравится, но по каким-то причинам мы не будем его опубликовать, мы также начнём с вами сотрудничество, но без гонорара за тестовое задание. В случае, если обзор в принципе не будет принят редакцией, тестовое также не будет оплачено.
Условия — удаленно, сдельно, гонорары и занятость обсуждаются с успешным кандидатом после тестового.
|
Производители называют полноприводные версии своих автомобилей различными способами, но на практике существуют лишь четыре вида систем полного привода: Полный привод Part-time Постоянный полный привод Автоматически-подключаемый полный привод Многорежимный полный привод полный привод part-time (Редактировать)Part-time 4wd, от англ. У автомобилей с part-time 4wd отсутствует межосевой дифференциал, который позволил бы карданным валам вращаться с разными скоростями когда автомобиль поворачивает. При включенном полном приводе передний и задний карданные валы через раздаточную коробку жёстко соеденены друг с другом и вращаются с одной скоростью. В повороте же передние колеса автомобиля проходят больший путь, чем задние. Иллюстрация: part time all wheel drive windup При включенном полном приводе и попытке повернуть автомобиль в трансмиссии возникают напряжения, которые могут ослабиться только за счет проскальзывания колес на грунте. Поэтому использование такого полного привода ограничено участками с очень низким коэффициентом сцепления (грязь, снег, лед, песок). Внимание! Надпись «Part-time 4wd» на селекторе режимов трансмиссии SelecTrac у Jeep Cherokee означает блокировку межосевого дифференциала. Тип трансмиссии SelecTrac — Многорежимный полный привод. постоянный полный привод (Редактировать)Англ. Full-time 4wd, permanent 4wd, permanently-engaged 4wd. Система, в которой усилие от двигателя передается на все колеса постоянно. Такая трансмиссия оснащена межосевым дифференциалом, что позволяет передним и задним колёсам проходить разные расстояния в поворотах. На таком автомобиле можно двигаться в режиме полного привода как по дорогам, так и на бездорожье. Для тяжелых дорожных условий межосевой дифференциал может быть заблокирован. В этом случае работа полного привода становится аналогичена Part-Time 4wd, т. В последние десятилетия получила применение электронная система контроля тягового усилия на всех четырех колесах, призванная заменить механическую блокировку дифференциалов. Такая система подтормаживает буксующие колеса, тем самым перераспределяя тяговое усилие на колеса, имеющие лучшее сцепление с дорогой (Mercedes ML, BMW X5, Land Rover Discovery II). Однако, при движении по серьезному бездорожью, такая электронная система не эффективна. автоматически-подключаемый полный привод (Редактировать)Англ. automatic 4wd, on-demand 4wd. В такой системе в нормальных дорожных условиях ведущим является только один мост. Полный привод подключается при необходимости. Как правило, это происходит при пробуксовке колес и, как только пробуксовка устранена, полный привод отключается. Для подключения второго моста может использоваться вискомуфта, или многодисковое сцепление приводимое гидронасосом, самоблокирующееся при появлении разницы в скоростях вращения переднего и заднего моста; или же многодисковое сцепление с электронным управлением, получающее информацию о пробуксовке от датчиков ABS и улавливающее малейшую разницу в скоростях вращения переднего и заднего мостов. Т.н. превентивная система автоматически-подключаемого полного привода способна с помощью различных датчиков (ускорения, степени нажатия акселератора и пр.) определять возможность пробуксовки и необходимость подключения полного привода до пробуксовки ведущих колёс. ajo |
многорежимный полный привод (Редактировать)Англ. Selectable 4wd. В другую категорию можно выделить автомобили Mitsubishi Pajero (трансмиссия Super Select 4wd) и Jeep Grand Cherookee (трансмиссия SelecTrac), Nissan Pathfinder (All-mode 4wd) с их селективной трансмиссией, которую можно назвать системой постоянного полного привода (автоматически-подключаемого в случае с Nissan Pathfinder) с возможностью принудительного отключения переднего моста. В Pajero, например, можно выбрать один из следующих режимов: 2wd, 4wd с автоматической блокировкой центрального дифференциала (аналогично Full-Time 4wd), 4wd с жестко заблокированным дифференциалом (аналогично Part-Time 4wd) и пониженная передача (Low range Part-Time 4wd). © www.awdwiki.com Для дополнительного чтения: (Редактировать)Видели лучшее описание Для Дополнительного Чтения: в печатном журнале? Пожалуйста остканируйте или сфотографируйте, и отправьте на в чем различие между терминами 4wd и awd? (Редактировать)Автопроизводители не всегда следуют каким-то определенным правилам, но во многих случаях все же можно дать определение этим терминам. |
 «Part time» — неполный рабочий день. Другими словами — полный привод временного использования. При движении по дорогам с твёрдым покрытием вся тяга передаётся только на один мост, как правило задний. Второй мост подключается водителем с помощью рычага или кнопки.
«Part time» — неполный рабочий день. Другими словами — полный привод временного использования. При движении по дорогам с твёрдым покрытием вся тяга передаётся только на один мост, как правило задний. Второй мост подключается водителем с помощью рычага или кнопки. На дороге с сухим твердым покрытием колесам очень тяжело провернуться, сильно изнашиваются шины, в трансмиссии возникает сильное напряжение, что может привести к ее серъезной поломке.
На дороге с сухим твердым покрытием колесам очень тяжело провернуться, сильно изнашиваются шины, в трансмиссии возникает сильное напряжение, что может привести к ее серъезной поломке. е. жесткое, но не равномерное распределение тяги между мостами, которое зависит от сцепных условий под ведущими колесами(от сцепного веса и коэффициента сцепления, если нет подъема). Где сцепные условия лучше, туда и будет подаваться больший крутящий момент. В некоторых системах блокировка межосевого дифференциала принудительно включается водителем, в других же межосевой дифференциал блокируется автоматически при пробуксовке или опасности пробуксовки колес. Для блокировки может использоваться, например, дифференциал Torsen, вискомуфта, управляемое электроникой многодисковое сцепление и пр.
е. жесткое, но не равномерное распределение тяги между мостами, которое зависит от сцепных условий под ведущими колесами(от сцепного веса и коэффициента сцепления, если нет подъема). Где сцепные условия лучше, туда и будет подаваться больший крутящий момент. В некоторых системах блокировка межосевого дифференциала принудительно включается водителем, в других же межосевой дифференциал блокируется автоматически при пробуксовке или опасности пробуксовки колес. Для блокировки может использоваться, например, дифференциал Torsen, вискомуфта, управляемое электроникой многодисковое сцепление и пр.

 Аббревиатура 4WD как правило относится к автомобилям повышенной проходимости, имеющим понижающий ряд трансмиссии (low range). AWD чаще всего применяется на полноприводных легковых автомобилях, которые в большинстве случаев не имеют понижающей передачи и часто являются моноприводными в нормальных дорожных условиях.
Аббревиатура 4WD как правило относится к автомобилям повышенной проходимости, имеющим понижающий ряд трансмиссии (low range). AWD чаще всего применяется на полноприводных легковых автомобилях, которые в большинстве случаев не имеют понижающей передачи и часто являются моноприводными в нормальных дорожных условиях.Симметричный полный привод Subaru — Major Subaru Новорижский
Subaru отмечает 40-ю годовщину своих полноприводных автомобилей
Компания Fuji Heavy Industries Ltd. (FHI), производитель автомобилей Subaru, объявила, что в 2012 году отмечается 40-я годовщина дебюта полноприводных автомобилей Subaru, первый из которых — Subaru Leone Estate Van 4WD — был представлен в Японии в 1972 году.
И сей день FHI остается пионером в области полноприводных легковых автомобилей. Общее количество произведенных *1 полноприводных автомобилей Subaru достигло 11 782 812 штук (на 31 января 2012 г. ), что составляет примерно 55,7% от всех продаж марки.
), что составляет примерно 55,7% от всех продаж марки.
Система полного привода Subaru обеспечивает эффективное распределение тягового усилия по всем четырем колесам. Благодаря сочетанию симметричного полного привода (SAWD) и горизонтально-оппозитного двигателя Subaru Boxer, силовой агрегат располагается симметрично относительно продольной оси автомобиля, а трансмиссия смещается назад, в пределы колесной базы. Такая компоновка оптимизирует продольно-поперечный баланс масс и обеспечивает стабильную тягу на любых покрытиях в разных условиях движения. Кроме того, достигается великолепная устойчивость на высоких скоростях и прекрасные характеристики поворачиваемости и чувствительности к управлению, что делает SAWD основной технологией, подводящей фундамент под философию безопасности Subaru в сочетании с удовольствием от вождения.
Благодаря непрерывным исследованиям, адаптируя систему полного привода Subaru к характеру каждой модели, в этой сфере FHI довела свои технологии до совершенства – от технологии, способной обеспечить управляемость на неровной дороге, до уникальной технологии, которая гарантирует высокую устойчивость в условиях дождя, снега или движения на высокой скорости. Новейшие разработки включают управление тяговым усилием на четырех колесах, что создает постоянное надежное сцепление всех четырех колес с дорогой.
Новейшие разработки включают управление тяговым усилием на четырех колесах, что создает постоянное надежное сцепление всех четырех колес с дорогой.
Дополнительная информация
Системы симметричного полного привода Subaru
- Система полного привода VTD*2: Спортивная версия полного привода с электронным управлением, улучшающая характеристики поворачиваемости. Компактная система полного привода включает в себя межосевой планетарный дифференциал и многодисковую гидравлическую муфту блокировки*3 с электронным управлением. Распределение крутящего момента между передними и задними колесами в соотношении 45:55 непрерывно корректируется блокировкой дифференциала с помощью многодисковой муфты. Распределение крутящего момента контролируется автоматически, вплоть до соотношения 50:50 между передними и задними колесами, с учетом состояния дорожного покрытия. Это обеспечивает великолепную устойчивость, а за счет распределения крутящего момента с акцентом на задние колеса улучшаются характеристики поворачиваемости, что обеспечивает агрессивное спортивное вождение.
Актуальные модели (российская спецификация)]
На российском рынке Subaru Legacy GT, Forester S-Edition, Outback 3.6, Tribeca, WRX STI с автоматической трансмиссией - Система полного привода с активным распределением крутящего момента (ACT): система полного привода с электронным управлением, повышающая экономичность и устойчивость. Оригинальная многодисковая муфта передачи крутящего момента Subaru с электронным управлением регулирует распределение крутящего момента между передними и задними колесами в режиме реального времени в соответствии с условиями движения. В штатных режимах система распределяет крутящий момент между передними и задними колесами в соотношении 60:40. Она максимально использует преимущества полного привода, обеспечивая устойчивую и безопасную управляемость в любой дорожной ситуации, независимо от уровня подготовки водителя.
[Актуальные модели (российская спецификация)]
На российском рынке Subaru Legacy / Outback 2. 5 с трансмиссией Lineartronic, Forester (с автоматической трансмиссией), Impreza и XV с трансмиссией Lineartronic. - Система полного привода с межосевым самоблокирующимся дифференциалом с вискомуфтой (CDG): Механическая система полного привода для механических трансмиссий. Система представляет собой сочетание межосевого дифференциала с коническими шестернями и блокировки на основе вискомуфты. В обычных условиях крутящий момент между передними и задними колесами распределяется в соотношении 50:50. Система обеспечивает безопасное спортивное вождение, всегда максимально используя доступную тягу.
[Актуальные модели (российская спецификация)]
Subaru Legacy, Forester, Impreza и XV с механической трансмиссией. - Система полного привода с многорежимным межосевым дифференциалом (DCCD*4): Система полного привода, ориентированная на обеспечение максимальных ходовых характеристик, для серьезных спортивных состязаний. Система полного привода с электронноуправляемым активным межосевым дифференциалом повышенного трения использует сочетание механической и электронной блокировок дифференциала при изменении крутящего момента. Крутящий момент между передними и задними колесами распределяется в соотношении 41:59, с акцентом на максимальные ходовые характеристики и оптимальное управление динамической стабилизацией автомобиля. Механическая блокировка отличается более быстрым откликом и срабатывает до электронной. Работая с большим крутящим моментом, система демонстрирует наилучший баланс между остротой управления и устойчивостью. Имеются предустановленные режимы управления блокировкой дифференциала, а также режим ручного управления, которыми водитель может пользоваться в соответствии с дорожной ситуацией.
[Актуальные модели (российская спецификация)]
Subaru WRX STI с механической трансмиссией.

 5 с трансмиссией Lineartronic, Forester (с автоматической трансмиссией), Impreza и XV с трансмиссией Lineartronic.
5 с трансмиссией Lineartronic, Forester (с автоматической трансмиссией), Impreza и XV с трансмиссией Lineartronic. 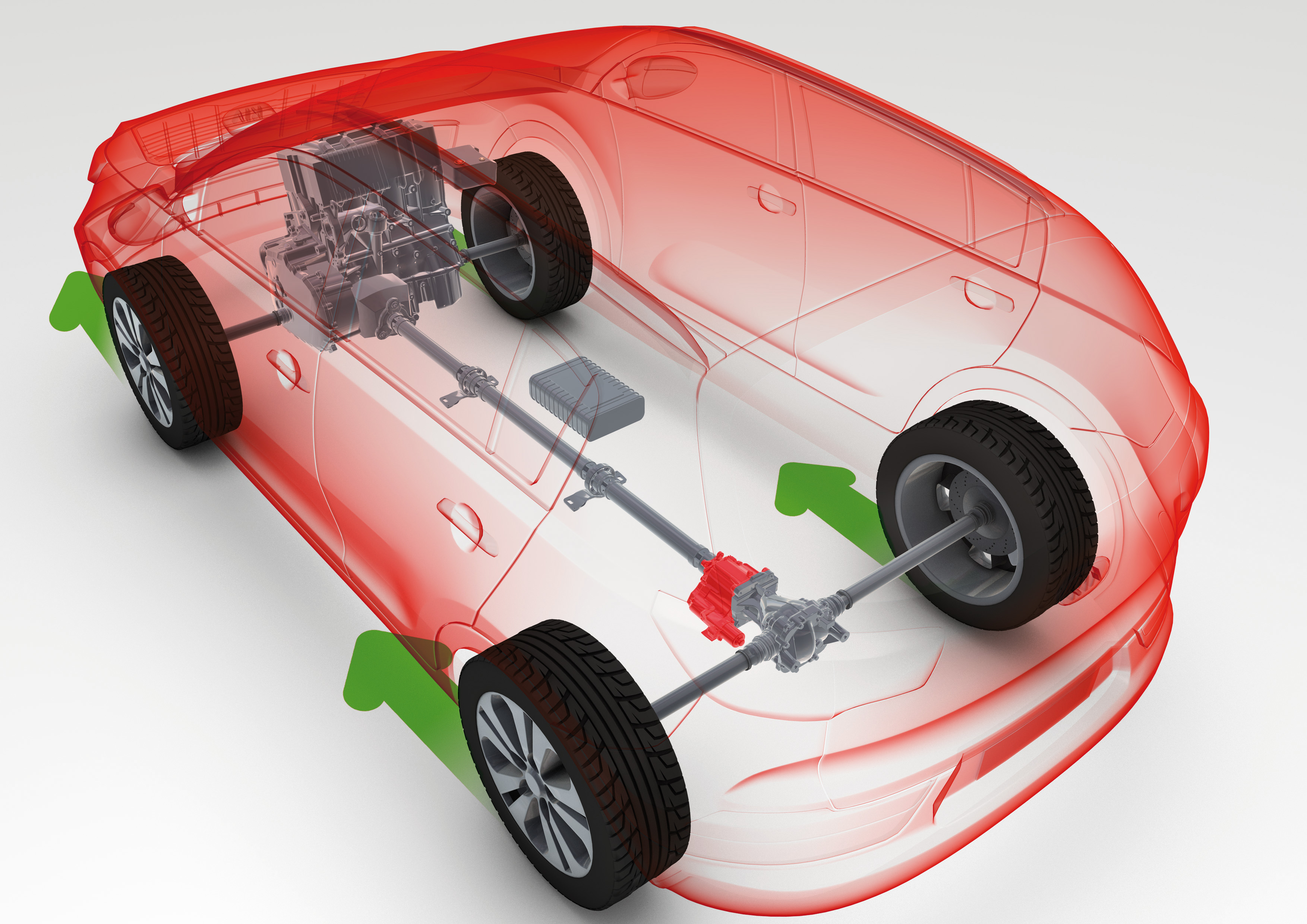 Система полного привода с электронноуправляемым активным межосевым дифференциалом повышенного трения использует сочетание механической и электронной блокировок дифференциала при изменении крутящего момента. Крутящий момент между передними и задними колесами распределяется в соотношении 41:59, с акцентом на максимальные ходовые характеристики и оптимальное управление динамической стабилизацией автомобиля. Механическая блокировка отличается более быстрым откликом и срабатывает до электронной. Работая с большим крутящим моментом, система демонстрирует наилучший баланс между остротой управления и устойчивостью. Имеются предустановленные режимы управления блокировкой дифференциала, а также режим ручного управления, которыми водитель может пользоваться в соответствии с дорожной ситуацией.
Система полного привода с электронноуправляемым активным межосевым дифференциалом повышенного трения использует сочетание механической и электронной блокировок дифференциала при изменении крутящего момента. Крутящий момент между передними и задними колесами распределяется в соотношении 41:59, с акцентом на максимальные ходовые характеристики и оптимальное управление динамической стабилизацией автомобиля. Механическая блокировка отличается более быстрым откликом и срабатывает до электронной. Работая с большим крутящим моментом, система демонстрирует наилучший баланс между остротой управления и устойчивостью. Имеются предустановленные режимы управления блокировкой дифференциала, а также режим ручного управления, которыми водитель может пользоваться в соответствии с дорожной ситуацией.*1 включая производство автомобилей с подключаемым полным приводом
*2VTD: Переменное распределение крутящего момента
*3 Управляемый дифференциал повышенного трения
*4 DCCD: Активный межосевой дифференциал
Symmetrical AWD
Симметричный полный привод
С момента своего появления в 1972 году технология Symmetrical AWD (All-Wheel Drive) непрерывно совершенствовалась. Дополненная горизонтально-оппозитным двигателем Subaru BOXER, она обеспечивает идеальную симметричность конструкции. Это обуславливает максимальную эффективность отдачи мощности двигателя, высокий уровень сцепления с дорогой и устойчивости автомобиля, а также идеальную развесовку. Абсолютный контроль над автомобилем сохраняется практически в любых условиях движения, превращая в удовольствие каждый километр пройденного пути.
Дополненная горизонтально-оппозитным двигателем Subaru BOXER, она обеспечивает идеальную симметричность конструкции. Это обуславливает максимальную эффективность отдачи мощности двигателя, высокий уровень сцепления с дорогой и устойчивости автомобиля, а также идеальную развесовку. Абсолютный контроль над автомобилем сохраняется практически в любых условиях движения, превращая в удовольствие каждый километр пройденного пути.
Крутящий момент двигателя постоянно передается на все четыре колеса и обеспечивает максимальное сцепление с дорогой, а, следовательно, и максимальную управляемость автомобиля, поэтому, чем лучше сцепление колес с дорогой, тем более уверенно Вы чувствуете себя за рулем своего автомобиля. Данное преимущество — Ваш залог успеха в экстремальных условиях, будь то плохая погода или аварийная ситуация, когда счет идет на доли секунды.
Преимущества
Лучший баланс
Когда Вы поворачиваете, центробежная сила направляет автомобиль к краю дороги. То, как далеко заносит автомобиль, зависит от центра тяжести. Если он расположен высоко, требуется больше времени на восстановление баланса и контроля над автомобилем. Если низко – как у Subaru – происходит меньший крен кузова и меньшее отклонение от курса, что придает большую устойчивость автомобилю.
То, как далеко заносит автомобиль, зависит от центра тяжести. Если он расположен высоко, требуется больше времени на восстановление баланса и контроля над автомобилем. Если низко – как у Subaru – происходит меньший крен кузова и меньшее отклонение от курса, что придает большую устойчивость автомобилю.
Улучшенная сила сцепления
Постоянный полный привод имеет особые достоинства перед приводом на 2 колеса (2WD) – особенно при движении на поворотах. Передавая мощь через все четыре колеса, автомобиль держится естественно и нейтрально по отношению к повороту, избегая неповоротливости или излишней поворачиваемости, что может приводить к неустойчивости и аварийным ситуациям.
Постоянный полный привод имеет особые достоинства перед приводом на 2 колеса (2WD) – особенно при движении на поворотах. Передавая мощь через все четыре колеса, автомобиль держится естественно и нейтрально по отношению к повороту, избегая неповоротливости или излишней поворачиваемости, что может приводить к неустойчивости и аварийным ситуациям.
Полный привод на Инфинити? Как он работает и насколько надёжен?
На большинстве моделей Infiniti используется полноприводная трансмиссия ATTESA E-TS. Система устанавливается на кроссоверы и седаны Инфинити с задним приводом для повышения проходимости автомобиля, а также обеспечения динамичного разгона и устойчивости на скользком покрытии.
Как работает полный Инфинити
Рассмотрим, как работает полный привод Инфинити. В обычном режиме вращающий момент с коленвала двигателя через КПП передается на заднюю ось. Скорость вращения колес постоянно измеряется датчиками ABS, передающие сигналы в модуль управления.
Электронный блок с 16-битным процессором 100 раз в секунду анализирует полученные сигналы с целью определения недостаточного сцепления с дорожным покрытием и срыва колес в пробуксовку. При обнаружении процессором увеличения скорости вращения колес, что указывает на занос или пробуксовку, генерируются импульсы на перераспределение до 50% мощности крутящего момента на передний привод Инфинити.
Особенности полного привода Инфинити
Конструкция заднего дифференциала предусматривает насос, повышающий давление смазки в специальном тоннеле. От величины давления зависит, сколько муфт центрального дифференциала задействуется для передачи на переднюю ось крутящего момента. Время определения пробуксовки и активации переднего привода занимает сотые доли секунды.
Особенность устройства полного привода на Инфинити в том, что электроника перед распределением вращающего момента на переднюю ось определяет допустимую границу пробуксовки или отклонения автомобиля от траектории. На практике это называется поздним срабатыванием, так как система не предупреждает начало заноса. Поэтому передние колеса не сразу получают поток мощности.
AWD – как знак качества
Мгновенное включение гидромуфты и передача 50% усилия на переднюю ось происходит при резком нажатии на газ. В результате при динамичном разгоне рационально используется мощность силового агрегата. Полный привод Инфинити помогает ускориться на скользкой дороге с обеспечением устойчивости машины, а в случае заноса в повороте при увеличении газа эффективно выведет машину на правильную траекторию. На Инфинити седан полный привод водитель может активировать в ручном режиме при движении на невысокой скорости до 30 км/ч.
Полный привод Инфинити помогает ускориться на скользкой дороге с обеспечением устойчивости машины, а в случае заноса в повороте при увеличении газа эффективно выведет машину на правильную траекторию. На Инфинити седан полный привод водитель может активировать в ручном режиме при движении на невысокой скорости до 30 км/ч.
Полный привод: постоянный и подключаемый. Как устроен и в чём разница?
Минусы:
- сложность по сравнению с жестко подключаемым приводом;
- большая масса;
- сложность настройки управляемости;
- повышенный расход топлива.
Первое, что приходит в голову, когда есть задача передать крутящий момент на две оси, — это жестко подсоединить их к раздатке железными трубами. Но вот незадача: при прохождении поворотов колеса автомобиля проходят разные пути.
Если жестко соединить оси, то какие-то колеса будут ехать, а какие-то — пробуксовывать. В грязи, когда покрытие мягкое, это нестрашно. Во времена Второй мировой, скажем, легендарные «Виллисы» спокойно ездили с жестко соединенными осями, потому как эксплуатировались исключительно на бездорожье. А вот если покрытие твердое, то эти пробуксовки будут порождать крутильные колебания и медленно, но верно разрушать трансмиссию.
В грязи, когда покрытие мягкое, это нестрашно. Во времена Второй мировой, скажем, легендарные «Виллисы» спокойно ездили с жестко соединенными осями, потому как эксплуатировались исключительно на бездорожье. А вот если покрытие твердое, то эти пробуксовки будут порождать крутильные колебания и медленно, но верно разрушать трансмиссию.
Поэтому в раздаточной коробке автомобилей с постоянным полным приводом располагается межосевой дифференциал — механизм, который распределяет мощность между осями и позволяет им вращаться с разной скоростью. И если какое-то колесо замедляется, то обороты другого увеличиваются, но настолько же падает и крутящий момент на нем.
Все это здорово, пока мы едем по асфальту, а что делать, если задней осью мы застряли в луже? На передних колесах, которые будут стоять на твердой поверхности, будет момент но не будет оборотов, зато задние будут вращаться очень быстро, но момент на них будет маленьким. Маленькой будет и мощность на заднем колесе и ровно такую же мощность дифференциал подаст на передок. Буксовать в таком случае можно хоть целую вечность — все равно не сдвинешься.
Маленькой будет и мощность на заднем колесе и ровно такую же мощность дифференциал подаст на передок. Буксовать в таком случае можно хоть целую вечность — все равно не сдвинешься.
Для таких случаев дифференциал снабжают блокировкой — когда она включена, обороты на всех колесах одинаковые, а момент зависит только от сцепления колес с дорогой.
За счет наличия дополнительных узлов (дифференциала и блокировки) вся система получается достаточно тяжелой и сложной. Кроме того, постоянная передача момента на все колеса увеличивает потери энергии, а значит, ухудшает динамику и увеличивает расход топлива.
Постоянный полный привод в автомобилестроении до сих пор используется, хотя в последнее время эту систему постепенно вытесняет полный привод по требованию, о котором речь пойдет дальше.
Жестко подключаемый (Part-time)
Как я могу изменить путь к android \ avd в моей Android Studio
Как я могу изменить путь к android \ avd в моей Android Studio — qaru Присоединяйтесь к Stack Overflow , чтобы учиться, делиться знаниями и строить свою карьеру.
Спросил
Просмотрено 31к раз
У меня есть такое exaption
InvalidPathException: недопустимый символ в индексе 9: C: \ Users \ ?????? \.android \ avd \ 1.avd (показать воздушный шар)
при попытке создать эмулятор. Могу ли я изменить расположение каталога .android?
Один игрок в крикет2,113 золотых знаков9292 серебряных знака185185 бронзовых знаков
Создан 09 ноя.
4128 золотых знаков33 серебряных знака77 бронзовых знаков
2- Панель управления открытая
- Затем перейдите в систему
- Затем перейдите к изменению переменных среды пользователя
- Затем нажмите создать новые переменные среды
- Создайте новую переменную с именем ANDROID_SDK_HOME
- Установите его значение в свой каталог Android, например
C: / users / <имя пользователя> /.андроид
Создан 09 ноя.
Keipakeipa55477 серебряных знаков1313 бронзовых знаков
1 Я попробовал предложенное решение, но мне это не помогло. В моем случае мне нужно добавить другую переменную, поэтому шаги для меня были:
В моем случае мне нужно добавить другую переменную, поэтому шаги для меня были:
- Открыть Панель управления
- Затем перейдите к Система и безопасность
- Затем перейдите к Система
- Затем перейдите к Расширенные настройки системы
- Затем перейдите в раздел «Изменение переменных среды пользователя»
- Затем нажмите создать новую переменную среды
- Создайте новую переменную с именем ANDROID_AVD_HOME
- Установите его значение в свой каталог Android, например
C: / users //.андроид
Создан 13 ноя.
ХавьерХавьер29333 серебряных знака1010 бронзовых знаков
0Как я могу изменить путь к android \ avd в моей Android Studio?
Допустим, вы хотите переместить каталог avd из каталога по умолчанию C: \ users \ —  android \ avd
android \ avd D: \ Development \ avd
- Переместите каталог avd в желаемое место (например,
D: \ Development \ avd) - Изменить или добавить переменную среды
ANDROID_AVD_HOME:D: \ Development \ avd- В Windows: Панель управления> Система> Расширенные настройки системы> Переменные среды
- Если переменная не закрывается. Щелкните
New ...и введите указанные выше данные. - Если переменная существует, выберите переменную, нажмите
Изменить...и замените значение переменной новым путем (например,D: \ Development \ avd)
- Если у вас уже есть AVD, измените avdName.ini на
D: \ Development \ avd \ avdName(например,D: \ Development \ avd \ Nexus_S_API_22.avd)
4,18422 золотых знака77 серебряных знаков2525 бронзовых знаков
Создан 29 апр.
Есть простой способ перенести avd (в windows):
откройте каталог:
C: \ Users \ Username \.android \ avd, вы найдете каталог с именем вашего AVD и файл .iniпереместите каталог на желаемый путь, затем измените переменную пути в файле .ini на новое место.
запустите студию Android, вы обнаружите, что AVD может работать правильно.
Создан 24 ноя.
Николас ГонгНиколас Гонг37144 серебряных знака55 бронзовых знаков
Просто переместите папку эмулятора (папка с расширением. avd) в новое место и сохраните файл .ini в том же месте, затем измените путь на новое место в файле .ini.
avd) в новое место и сохраните файл .ini в том же месте, затем измените путь на новое место в файле .ini.
Изменять или добавлять переменные среды не требуется.
старый путь путь = C: \ Users \ nero \ .android \ avd \ Android_Q.avd
новый путь путь = D: \ androidmuators \ avd \ Android_Q.avd
Вы можете хранить свой эмулятор где угодно, просто нужно указать в конфигурационном файле .ini, где находится ваш эмулятор.
ответ дан 7 апр в 7:12
NeroNero2144 бронзовых знака
Была такая же проблема.Причина в том, что ANDROID_AVD_HOME указывает на мой каталог пользователя, в котором есть пробел и умляут. Очевидно, это вызывает некоторые проблемы с Android Studio.
Таким образом, определение общесистемной точки ANDROID_AVD_HOME на d: \ development \ avd \ решило проблему.
Очевидно, это вызывает некоторые проблемы с Android Studio.
Таким образом, определение общесистемной точки ANDROID_AVD_HOME на d: \ development \ avd \ решило проблему.
Создан 26 ноя.
по умолчанию
Stack Overflow лучше всего работает с включенным JavaScriptВаша конфиденциальность
Нажимая «Принять все файлы cookie», вы соглашаетесь, что Stack Exchange может хранить файлы cookie на вашем устройстве и раскрывать информацию в соответствии с нашей Политикой в отношении файлов cookie.
Принимать все файлы cookie Настроить параметры
Создание виртуальных устройств и управление ими | Разработчики Android
Виртуальное устройство Android (AVD) — это конфигурация, которая определяет характеристики телефона, планшета Android, Wear OS, Android TV или Автомобильное устройство с ОС, которое вы хотите смоделировать в Эмулятор Android.AVD Manager — это интерфейс, который вы можете запустить из Android Studio и который поможет вам создавать и управлять AVD.
Чтобы открыть AVD Manager, выполните одно из следующих действий:
- Выберите Инструменты> AVD Manager .
- Нажмите AVD Manager на панели инструментов.

О AVD
AVD содержит профиль оборудования, образ системы, область хранения, обложку, и другие свойства.
Мы рекомендуем вам создать AVD для каждого образа системы, который ваше приложение
потенциально может поддержать на основе настройка в вашем манифесте.
Профиль фурнитуры
Профиль оборудования определяет характеристики устройства как поставляется с завода. AVD Manager поставляется с предустановленными профили оборудования, такие как устройства Pixel, и вы можете определить или настроить профили оборудования по мере необходимости.
Обратите внимание, что только некоторые профили оборудования включают Play Store . Этот указывает, что эти профили полностью совместимы с CTS и могут использовать систему изображения, которые включают приложение Play Store.
Системные образы
Образ системы, помеченный API Google , включает доступ к
Гугл игры
Сервисы. Системный образ с логотипом Google Play в Play
Столбец Store включает приложение Google Play Store и доступ к
Сервисы Google Play, в том числе вкладка Google Play в расширенной версии диалог управления с удобной кнопкой для обновления Google Play
сервисов на устройстве.
Системный образ с логотипом Google Play в Play
Столбец Store включает приложение Google Play Store и доступ к
Сервисы Google Play, в том числе вкладка Google Play в расширенной версии диалог управления с удобной кнопкой для обновления Google Play
сервисов на устройстве.
Для обеспечения безопасности приложений и согласованного взаимодействия с физическими устройствами, системные образы с включенным Google Play Store подписаны с выпуском key, что означает, что вы не можете получить повышенные привилегии (root) с этими изображений.Если вам требуются повышенные привилегии (root) для поддержки вашего приложения устранение неполадок, вы можете использовать систему Android Open Source Project (AOSP) изображения, не содержащие приложений или сервисов Google.
Склад
AVD имеет специальную область хранения на вашей машине для разработки. Он хранит
данные пользователя устройства, такие как установленные приложения и настройки, а также
эмулированная SD-карта. При необходимости вы можете использовать AVD Manager для стирания пользовательских данных, поэтому
устройство имеет те же данные, что и новое.
При необходимости вы можете использовать AVD Manager для стирания пользовательских данных, поэтому
устройство имеет те же данные, что и новое.
Кожа
Оболочка эмулятора определяет внешний вид устройства. Менеджер AVD предоставляет несколько предопределенных скинов. Вы также можете определить свои собственные или использовать скины предоставляется третьими сторонами.
AVD и функции приложений
Убедитесь, что определение AVD включает функции устройства, от которых зависит ваше приложение. См. Свойства профиля оборудования и Свойства AVD для списков функций, которые вы можете определить в своих AVD.
Создать AVD
Совет: Если вы хотите запустить свое приложение в эмуляторе, вместо этого
запустить свой
app из Android Studio, а затем в диалоговом окне Select Deployment Target В появившемся окне щелкните Create New Virtual Device ./Privod(0.104-603.0).jpg)
Для создания нового AVD:
- Откройте AVD Manager, щелкнув Инструменты> AVD Manager .
- Щелкните Create Virtual Device , at
внизу диалогового окна AVD Manager.
Появится страница Select Hardware .
Обратите внимание, что только некоторые профили оборудования включают Play Store . Этот указывает, что эти профили полностью совместимы с CTS и могут использовать систему изображения, которые включают приложение Play Store.
- Выберите профиль оборудования, а затем щелкните Далее .
- Выберите образ системы для определенного уровня API и нажмите Далее .
- Измените свойства AVD по мере необходимости,
а затем щелкните Finish .
Нажмите Показать дополнительные настройки , чтобы показать больше настройки, например скин.
Если вы не видите нужный профиль оборудования, вы можете Создайте или импортируйте профиль оборудования.
Появится страница System Image .
На вкладке Рекомендуемые перечислены рекомендуемые образы системы. В
другие вкладки содержат более полный список.Правая панель описывает
выбранный образ системы. Образы x86 работают быстрее всего в эмуляторе.
В
другие вкладки содержат более полный список.Правая панель описывает
выбранный образ системы. Образы x86 работают быстрее всего в эмуляторе.
Если вы видите Download рядом с образом системы, вам необходимо чтобы щелкнуть по нему, чтобы загрузить образ системы. Вы должны быть подключены к Интернет, чтобы скачать его.
Уровень API целевого устройства важен, потому что ваше приложение
не сможет бежать
в образе системы с уровнем API ниже, чем требуется
ваше приложение, как указано
в minSdkVersion атрибут файла манифеста приложения.Для большего
информация о взаимосвязи между системным уровнем API и minSdkVersion , см. Управление версиями приложений.
Если ваше приложение объявляет <библиотека использования> элемент в файле манифеста, приложению требуется системный образ, в котором этот внешний
библиотека присутствует. Если вы хотите запустить приложение на эмуляторе, создайте AVD, который
включает необходимую библиотеку. Для этого вам может потребоваться дополнительный компонент для
Платформа AVD; например, надстройка Google APIs содержит библиотеку Google Maps.
Если вы хотите запустить приложение на эмуляторе, создайте AVD, который
включает необходимую библиотеку. Для этого вам может потребоваться дополнительный компонент для
Платформа AVD; например, надстройка Google APIs содержит библиотеку Google Maps.
Появится страница Проверить конфигурацию .
Новый AVD появится на странице Your Virtual Devices или Диалоговое окно «Выбор цели развертывания ».
Чтобы создать AVD, начиная с копии:
- Из Ваши виртуальные устройства страница из в диспетчере AVD щелкните правой кнопкой мыши AVD и выберите Дубликат .
- Нажмите Изменить или Предыдущий , если вы необходимо внести изменения в Образ системы и Выберите Оборудование страниц.
- Внесите изменения и нажмите Готово .
Или нажмите Меню и выберите Дублировать .
The Проверить конфигурацию появляется страница.
AVD появится на странице Your Virtual Devices .
Создать профиль оборудования
AVD Manager предоставляет предопределенные профили оборудования для общих устройств, поэтому вы можете легко добавить их к своим определениям AVD.Если вам нужно определить другое устройство, вы можете создать новый профиль оборудования. Вы можете определить новый профиль оборудования с самого начала, или скопируйте профиль оборудования для начала. Предварительно загруженный профили оборудования не редактируются.
Чтобы создать новый профиль оборудования с самого начала:
- В Выбрать оборудование нажмите Новый профиль оборудования .
- На странице Настроить профиль оборудования измените свойства профиля оборудования как нужный.
- Нажмите Готово .
Ваш новый профиль оборудования появится на странице Select Hardware . При желании вы можете создать AVD который использует профиль оборудования нажав Далее . Или нажмите Отмена , чтобы вернуться на страницу Your Virtual Devices или Select Deployment Target диалог.
Чтобы создать профиль оборудования, начиная с копии:
- В Выбрать оборудование выберите профиль оборудования и щелкните Clone Device .
- На странице Настроить профиль оборудования измените свойства профиля оборудования как нужный.
- Нажмите Готово .
Или щелкните правой кнопкой мыши профиль оборудования и выберите Клонировать .
Ваш новый профиль оборудования появится на странице Select Hardware . При желании вы можете создать AVD
который использует профиль оборудования
нажав Далее . Или нажмите Отмена , чтобы вернуться
на страницу Your Virtual Devices или Select Deployment Target диалог.
При желании вы можете создать AVD
который использует профиль оборудования
нажав Далее . Или нажмите Отмена , чтобы вернуться
на страницу Your Virtual Devices или Select Deployment Target диалог.
Редактировать существующие AVD
На странице Ваши виртуальные устройства вы можете выполнить следующие операции на существующем AVD:
- Чтобы отредактировать AVD, щелкните Edit this AVD а также внесите свои изменения.
- Чтобы удалить AVD, щелкните правой кнопкой мыши AVD и выберите Исключить . Или нажмите Меню и выберите Удалить .
- Чтобы показать связанные AVD
.iniи.imgфайлов на диске, щелкните правой кнопкой мыши AVD и выберите Показать на диске .Или нажмите Меню и выберите Показать на диске . - Для просмотра деталей конфигурации AVD, которые вы можете включите в любые отчеты об ошибках для команды Android Studio, щелкните правой кнопкой мыши AVD и выберите Просмотреть подробности . Или нажмите Меню и выберите Просмотреть подробности .

Редактировать существующие профили оборудования
На странице выбора оборудования , ты можешь выполнить следующие операции с существующим профилем оборудования:
- Чтобы изменить профиль оборудования, выберите его и нажмите Редактировать устройство .Или щелкните правой кнопкой мыши профиль оборудования и выберите Редактировать . Следующий, внесите свои изменения.
- Чтобы удалить профиль оборудования, щелкните его правой кнопкой мыши и выберите Исключить .
Вы не можете редактировать или удалять предопределенные профили оборудования.
Запуск и остановка эмулятора и очистка данных
На странице Ваши виртуальные устройства вы можете выполнить на эмуляторе следующие операции:
- Чтобы запустить эмулятор, использующий AVD, дважды щелкните AVD.Или нажмите Запустить .
- Чтобы остановить работающий эмулятор, щелкните правой кнопкой мыши AVD и выберите Остановка . Или нажмите Меню и выберите Stop .
- Чтобы очистить данные для эмулятора и вернуть его в то же состояние, что и при он был впервые определен, щелкните правой кнопкой мыши AVD и выберите Удалить данные . Или нажмите Меню и выберите Wipe Data .
Импорт и экспорт профилей оборудования
На странице выбора оборудования , вы можете импортировать и экспортировать профили оборудования:
- Чтобы импортировать профиль оборудования, щелкните Импортируйте профили оборудования и выберите файл XML, содержащий
определение на вашем компьютере.
- Чтобы экспортировать профиль оборудования, щелкните его правой кнопкой мыши и выберите Экспорт . Укажите место, где вы хотите сохранить XML-файл, содержащий определение.

Свойства профиля оборудования
Вы можете указать следующие свойства профилей оборудования в Настроить профиль оборудования Страница . AVD Свойства конфигурации переопределяют свойства профиля оборудования и эмулятор свойства, которые вы устанавливаете во время работы эмулятора, переопределяют их оба.
Предопределенные профили оборудования, включенные в AVD Manager, не редактируемый. Однако вы можете копировать их и редактировать копии.
| Свойство профиля оборудования | Описание |
|---|---|
| Имя устройства | Имя профиля оборудования.
Имя может содержать заглавные буквы или
строчные буквы,
числа от 0 до 9, точки (. ), подчеркивания (_), круглые скобки (()) и пробелы.
Имя файла, в котором хранится профиль оборудования, происходит от имени
имя профиля оборудования. ), подчеркивания (_), круглые скобки (()) и пробелы.
Имя файла, в котором хранится профиль оборудования, происходит от имени
имя профиля оборудования. |
| Тип устройства | Выберите одно из следующего:
|
| Размер экрана | Физический размер экрана в дюймах по диагонали. Если размер больше экрана вашего компьютера, он уменьшается на запуск. |
| Разрешение экрана | Введите ширину и высоту в пикселях, чтобы указать общее количество пикселей. на смоделированном экране. |
| Круглый | Выберите этот вариант, если устройство имеет круглый экран, например некоторые Носите устройства с ОС. |
| Память: RAM | Введите размер RAM для устройства и выберите единицы измерения: B (байт),
КБ (килобайт), МБ (мегабайт), ГБ (гигабайт) или ТБ (терабайт). |
| Вход: имеет аппаратные кнопки (Назад / Домой / Меню) | Выберите этот вариант, если на вашем устройстве есть аппаратные кнопки навигации. Снимите этот флажок, если эти кнопки реализованы только программно.если ты выберите этот вариант, кнопки не будут отображаться на экране. Вы можете использовать боковую панель эмулятора для «нажатия» кнопок в любом случае. |
| Вход: аппаратная клавиатура | Выберите этот вариант, если ваше устройство оснащено аппаратной клавиатурой. Отмените выбор если нет. Если вы выберете этот вариант, клавиатура не появится на экран. Вы можете использовать клавиатуру компьютера, чтобы отправлять нажатия клавиш на эмулятор, в любом случае. |
| Стиль навигации | Выберите одно из следующего:
Эти параметры предназначены для реальных аппаратных средств управления на самом устройстве. |
| Поддерживаемые состояния устройства | Выберите один или оба варианта:
Если выбрать оба варианта, можно переключаться между ориентациями в эмуляторе. Вы должны выбрать хотя бы один вариант, чтобы продолжить. |
| Камеры | Чтобы включить камеру, выберите один или оба варианта:
Позже вы можете использовать веб-камеру или фотографию, предоставленную эмулятором, для моделирования сделать снимок с помощью камеры. |
| Датчики: акселерометр | Выберите, есть ли у устройства оборудование, которое помогает устройству определять
его ориентация. |
| Датчики: гироскоп | Выберите, есть ли в устройстве оборудование, определяющее вращение или скручивание. В сочетании с акселерометр, он может обеспечить более плавное определение ориентации и поддержку шестиосевая система ориентации. |
| Датчики: GPS | Выберите, имеет ли устройство оборудование, поддерживающее глобальное позиционирование. Система (GPS) спутниковая навигационная система. |
| Датчики: Датчик приближения | Выберите, есть ли у устройства оборудование, которое определяет, закрыто ли устройство. к твоему лицу во время телефонный звонок, чтобы отключить ввод с экрана. |
| Обложка по умолчанию | Выберите обложку, которая определяет внешний вид устройства при отображении.
в
эмулятор. Помните, что при указании размера экрана, слишком большого для
разрешение может означать, что экран отключен, поэтому вы не можете видеть весь
экран. Видеть
Создать скин эмулятора
для дополнительной информации. Видеть
Создать скин эмулятора
для дополнительной информации. |
 Тем не мение,
события, отправленные на устройство внешним контроллером, такие же.
Тем не мение,
события, отправленные на устройство внешним контроллером, такие же.AVD свойства
Вы можете указать следующие свойства для конфигураций AVD на странице Проверить конфигурацию . Конфигурация AVD определяет взаимодействие между разработками компьютер и эмулятор, а также свойства, которые вы хотите переопределить в профиль оборудования.
Свойства конфигурации AVD переопределяют свойства профиля оборудования. Свойства эмулятора, которые вы устанавливаете во время работы эмулятора, переопределяют их оба.
| AVD Property | Описание |
|---|---|
| Имя AVD | Название АВД. Имя может содержать заглавные буквы или строчные буквы, числа от 0 до 9, точки (.), подчеркивания (_), круглые скобки (()), тире (-) и пробелы. Имя файла, в котором хранится конфигурация AVD, происходит от AVD. название. |
| AVD ID (расширенный) | Имя файла AVD происходит из идентификатора, и вы можете использовать его для
обратитесь к AVD из командной строки. |
| Профиль оборудования | Щелкните Изменить , чтобы выбрать другой профиль оборудования в страница Выбор оборудования . |
| Системный образ | Щелкните Изменить , чтобы выбрать другой образ системы в Образ системы стр. Для загрузки нового изображения требуется активное подключение к Интернету. |
| Ориентация при запуске | Выберите один вариант для начальной ориентации эмулятора:
Параметр доступен, только если он выбран в профиле оборудования. Когда запустив AVD в эмуляторе, вы можете изменить ориентацию, если и портретная, и пейзаж поддерживаются в профиле оборудования. |
| Камера (расширенная) | Чтобы включить камеру, выберите один или оба варианта:
Параметр Emulated создает изображение, сгенерированное программным обеспечением, в то время как Веб-камера использует ваш разработка компьютерной веб-камеры для фотографирования. Этот параметр доступен, только если он выбран в профиле оборудования; это недоступно для Wear OS и Android TV. |
| Сеть: скорость (расширенная) | Выберите сетевой протокол для определения скорости передачи данных:
|
| Сеть: задержка (расширенный) | Выберите сетевой протокол, чтобы указать, сколько времени (задержки) потребуется для протокол для передачи пакета данных из одной точки в другую. |
| Эмулируемая производительность: графика | Выберите способ визуализации графики в эмуляторе:
|
| Эмулируемая производительность: вариант загрузки (расширенный) |
|
| Эмулируемая производительность: многоядерный процессор (расширенный) | Выберите количество ядер процессора на вашем компьютере, которое вы хотите использовать для эмулятора. Использование большего количества ядер процессора ускоряет работу эмулятора. |
| Память и хранилище: RAM | Объем оперативной памяти на устройстве. Это значение устанавливается аппаратным обеспечением. производителя, но вы можете переопределить его, если необходимо, например, для более быстрого эмулятор работы.Увеличение размера потребляет больше ресурсов на вашем компьютер. Введите размер RAM и выберите единиц, один из B (байт), KB (килобайт), MB (мегабайт), GB (гигабайт) или ТБ (терабайт). |
| Память и хранилище: куча виртуальной машины | Размер кучи виртуальной машины. Это значение устанавливается аппаратным обеспечением.
производителя, но вы можете изменить его при необходимости. Введите размер кучи и
выберите
единиц, один из B (байт), KB (килобайт), MB (мегабайт), GB (гигабайт) или
ТБ (терабайт). Для получения дополнительной информации о виртуальных машинах Android см.
Управление памятью для
Различные виртуальные машины. Это значение устанавливается аппаратным обеспечением.
производителя, но вы можете изменить его при необходимости. Введите размер кучи и
выберите
единиц, один из B (байт), KB (килобайт), MB (мегабайт), GB (гигабайт) или
ТБ (терабайт). Для получения дополнительной информации о виртуальных машинах Android см.
Управление памятью для
Различные виртуальные машины. |
| Память и хранилище: внутренняя память | Объем неизвлекаемой памяти, доступной на устройстве. Этот значение устанавливается оборудованием производителя, но вы можете изменить его при необходимости. Введите размер и выберите единиц, один из B (байт), KB (килобайт), MB (мегабайт), GB (гигабайт) или ТБ (терабайт). |
| Память и хранилище: SD-карта | Объем съемной памяти, доступной для хранения данных на
устройство.Чтобы использовать виртуальную SD-карту, управляемую Android Studio, выберите Управляемый студией , введите размер и выберите
единиц, один из B (байт), KB (килобайт), MB (мегабайт), GB (гигабайт) или
ТБ (терабайт). Для использования камеры рекомендуется не менее 100 МБ. К
управлять пространством в файле, выберите Внешний файл и
щелкните … , чтобы указать файл и его расположение. Для большего
информацию см. mksdcard и
Каталог данных AVD. Для использования камеры рекомендуется не менее 100 МБ. К
управлять пространством в файле, выберите Внешний файл и
щелкните … , чтобы указать файл и его расположение. Для большего
информацию см. mksdcard и
Каталог данных AVD. |
| Фрейм устройства: Включить фрейм устройства | Выберите, чтобы включить рамку вокруг окна эмулятора, имитирующую внешний вид реального устройства. |
| Пользовательское определение темы оформления (расширенное) | Выберите обложку, которая определяет внешний вид устройства при отображении в эмулятор. Помните, что указание слишком большого размера экрана для кожа может означать, что экран отключен, поэтому вы не можете видеть весь экран. Видеть Создать скин эмулятора для дополнительной информации. |
| Клавиатура: включить ввод с клавиатуры (расширенный) | Выберите этот вариант, если вы хотите использовать аппаратную клавиатуру для взаимодействия
с эмулятором.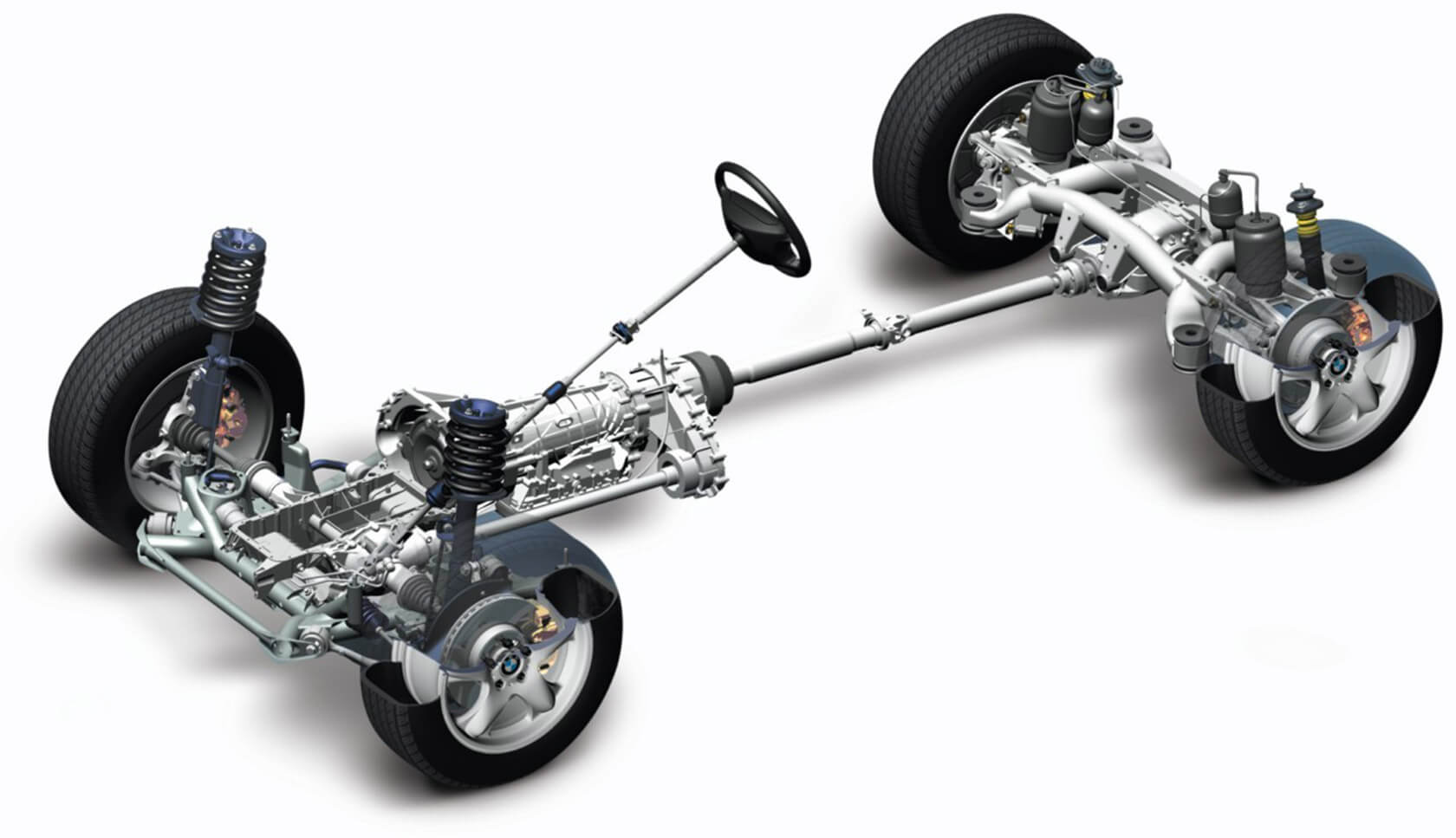 Он отключен для Wear OS и Android TV. Он отключен для Wear OS и Android TV. |



Создать скин эмулятора
Оболочка эмулятора Android — это набор файлов, определяющих визуальный и элементы управления дисплей эмулятора. Если определения скинов доступны в настройках AVD не соответствуют вашим требованиям, вы можете создать собственное определение скина, а затем применить его к AVD.
Каждый скин эмулятора содержит:
- A
hardware.iniфайл - Файлы макета для поддерживаемых ориентаций (альбомная, портретная) и физическая конфигурация
- Файлы изображений для элементов отображения, таких как фон, клавиши и пуговицы
Чтобы создать и использовать собственный скин:
- Создайте новый каталог, в котором вы сохраните конфигурацию скина файлы.
- Определите внешний вид обложки в текстовом файле с именем
макет. Этот файл определяет многие характеристики кожи, такой как размер и изображения для определенных кнопок. Например:parts { устройство { отображать { ширина 320 высота 480 х 0 у 0 } } портрет { задний план { изображение background_port.png } кнопки { мощность { изображение button_vertical.PNG х 1229 y 616 } } } ... } - Добавьте растровые файлы изображений устройств в тот же каталог.
- Укажите дополнительные аппаратные конфигурации устройства в
hardware.iniфайл для настроек устройства, напримерhw.keyboardигв. Жк. Плотность. - Заархивируйте файлы в папке скинов и выберите файл архива в качестве кастомный скин.
Подробнее о создании скинов эмулятора см. Спецификация файла скина эмулятора Android в исходном коде инструментов.
Настройка AVD и мобильной связи
Сертификация и расширение возможностей.
Be
Govt. Сертифицированный разработчик приложений для Android
Виртуальное устройство Android (AVD) — это конфигурация эмулятора, которая позволяет разработчику моделировать реальное устройство, определяя параметры оборудования и программного обеспечения, которые будут эмулироваться эмулятором Android.
Самый простой способ создать AVD — использовать графический AVD Manager, который разработчик запускает из Eclipse, щелкнув Window> AVD Manager.Разработчик также может запустить AVD Manager из командной строки, вызвав androidtool с avdoptions из каталога
Разработчик также может создавать AVD в командной строке, передавая параметры androidtool. AVD состоит из:
- Профиль оборудования: определяет аппаратные функции виртуального устройства. Например, разработчик может определить, есть ли в устройстве камера, используется ли физическая клавиатура QWERTY или панель набора номера, сколько у него памяти и т. Д.
- Сопоставление с образом системы: разработчик может определить, какая версия платформы Android будет работать на виртуальном устройстве. Разработчик может выбрать версию стандартной платформы Android или образ системы, упакованный с надстройкой SDK.
- Другие параметры: Разработчик может указать разработчик скина эмулятора, который хочет использовать с AVD, что позволяет разработчику управлять размерами экрана, внешним видом и т. Д. Разработчик также может указать эмулируемую SD-карту для использования с AVD.
- Выделенная область хранения на машине разработчика: в этой области хранятся пользовательские данные устройства (установленные приложения, настройки и т. Д.) И эмулированная SD-карта.
Разработчик может создать столько AVD, сколько потребуется разработчику, в зависимости от типов устройств, которые разработчик хочет смоделировать. Чтобы тщательно протестировать приложение, разработчик должен создать AVD для каждой общей конфигурации устройства (например, для разных размеров экрана и версий платформы), с которым приложение совместимо, и протестировать приложение на каждом из них.
Помните об этих моментах, когда разработчик выбирает целевой образ системы для AVD:
- Уровень API целевого объекта важен, потому что приложение не сможет работать в образе системы, уровень API которого меньше, чем требуется для приложения, как указано в атрибуте minSdkVersion файла манифеста приложения.
- Разработчик должен создать по крайней мере один AVD, который использует цель, уровень API которого выше, чем требуется для приложения, потому что это позволяет разработчику тестировать прямую совместимость приложения. Тестирование на прямую совместимость гарантирует, что когда пользователи, загрузившие приложение, получат обновление системы, приложение продолжит нормально функционировать.
- Если приложение объявляет элемент
uses-libraryв своем файле манифеста, приложение может работать только в системном образе, в котором присутствует эта внешняя библиотека.Если разработчик хочет запустить приложение на эмуляторе, создайте AVD, который включает необходимую библиотеку. Обычно разработчик должен создать такой AVD, используя дополнительный компонент для платформы AVD (например, надстройка Google APIs содержит библиотеку Google Maps).
Создание AVD
AVD Manager — это простой в использовании пользовательский интерфейс для управления конфигурациями AVD (Android Virtual Device). AVD — это конфигурация устройства для эмулятора Android, которая позволяет разработчику моделировать различные конфигурации устройств на базе Android.Когда разработчик запускает AVD Manager в Eclipse или запускает инструмент android в командной строке.
На главном экране разработчик может создавать, удалять, восстанавливать и запускать AVD, а также просматривать детали каждого AVD.
Создание AVD
Разработчик может создать столько AVD, сколько разработчик хотел бы протестировать. Рекомендуется, чтобы разработчик тестировал приложения на всех уровнях API выше, чем целевой уровень API для приложения.
Для создания AVD:
- Запустите AVD Manager:
- В Eclipse: выберите Окно > AVD Manager или щелкните значок AVD Manager на панели инструментов Eclipse.
- В других IDE: перейдите в каталог SDK
tools /и запустите инструментandroidбез аргументов.
- На панели Virtual Devices вы увидите список существующих AVD. Щелкните New , чтобы создать новый AVD. Появится диалоговое окно Create New AVD .
- Введите данные для AVD: укажите имя, платформу, размер SD-карты и обложку (по умолчанию — HVGA). Разработчик также может добавить определенные аппаратные функции эмулируемого устройства, нажав кнопку New… и выбрав функцию.Обязательно определите цель для AVD, которая удовлетворяет цели сборки приложения (цель платформы AVD должна иметь уровень API, равный или больший, чем уровень API, с которым компилируется приложение).
- Щелкните Create AVD .
AVD теперь готов, и разработчик может закрыть AVD Manager, создать дополнительные AVD или запустить эмулятор с AVD, выбрав устройство и нажав Start .
Дополнительное оборудование
Если разработчик создает новый AVD, разработчик может указать следующие параметры оборудования для эмуляции AVD:
Характеристика | Описание | Недвижимость |
| Размер ползуна устройства | Объем физической оперативной памяти устройства в мегабайтах.Значение по умолчанию — «96». | hw.ram Размер |
| Держатель сенсорного экрана | Есть ли на устройстве сенсорный экран. Значение по умолчанию — «да». | hw.touchScreen |
| Опора трекбола | Есть ли на устройстве трекбол. Значение по умолчанию — «да». | hw.trackBall |
| Держатель клавиатуры | Наличие в устройстве QWERTY-клавиатуры. Значение по умолчанию — «да». | hw.клавиатура |
| Поддержка DPad | Наличие на устройстве ключей DPad. Значение по умолчанию — «да». | hw.dPad |
| Поддержка GSM модема | Есть ли в устройстве GSM-модем. Значение по умолчанию — «да». | Модемhw.gsm |
| Опора камеры | Есть ли в устройстве камера. Значение по умолчанию — «нет». | hw.камера |
| Максимальное количество пикселей камеры по горизонтали | Значение по умолчанию — «640». | hw.camera.maxHorizontalPixels |
| Максимальное количество пикселей камеры по вертикали | Значение по умолчанию — «480». | hw.camera.maxVerticalPixels |
| Поддержка GPS | Есть ли в устройстве GPS. Значение по умолчанию — «да». | hw.gps |
| Держатель аккумулятора | Может ли устройство работать от аккумулятора. Значение по умолчанию — «да». | hw. Аккумулятор |
| Акселерометр | Есть ли в приборе акселерометр.Значение по умолчанию — «да». | hw. Акселерометр |
| Поддержка записи звука | Может ли устройство записывать звук. Значение по умолчанию — «да». | hw.audioInput |
| Поддержка воспроизведения аудио | Может ли устройство воспроизводить звук. Значение по умолчанию — «да». | hw.audioOutput |
| Поддержка SD-карты | Поддерживает ли устройство вставку / извлечение виртуальных SD-карт. Значение по умолчанию — «да». | hw.sdCard |
| Поддержка раздела кэша | Используем ли мы на устройстве раздел / cache. Значение по умолчанию — «да». | disk.cachePartition |
| Размер раздела кэша | Значение по умолчанию — «66 МБ». | disk.cachePartition.size |
| Абстрактная плотность ЖК-дисплея | Устанавливает обобщенную характеристику плотности, используемую экраном AVD. Значение по умолчанию — «160». | hw.жк. плотность |
Инструмент android позволяет разработчику управлять AVD из командной строки.
Список целей
Чтобы сгенерировать список целей образа системы, используйте эту команду:
список Android-целей
Инструмент android сканирует каталоги и в поисках действительных образов системы, а затем генерирует список целей. Вот пример вывода команды:
Доступные цели Android:
id: 1 или "android-3"
Название: Android 1.5
Тип: Платформа
Уровень API: 3
Ревизия: 4
Скины: QVGA-L, HVGA-L, HVGA (по умолчанию), HVGA-P, QVGA-P
id: 2 или "android-4"
Название: Android 1.6
Тип: Платформа
Уровень API: 4
Ревизия: 3
Скины: QVGA, HVGA (по умолчанию), WVGA800, WVGA854
id: 3 или "android-7"
Название: Android 2.1-update1
Тип: Платформа
Уровень API: 7
Ревизия: 2
Обложки: QVGA, WQVGA400, HVGA (по умолчанию), WVGA854, WQVGA432, WVGA800
id: 4 или "android-8"
Название: Android 2.2
Тип: Платформа
Уровень API: 8
Ревизия: 2
Обложки: WQVGA400, QVGA, WVGA854, HVGA (по умолчанию), WVGA800, WQVGA432
id: 5 или "андроид-9"
Название: Android 2.3
Тип: Платформа
Уровень API: 9
Ревизия: 1
Обложки: HVGA (по умолчанию), WVGA800, WQVGA432, QVGA, WVGA854, WQVGA400
Создание AVD
Помимо создания AVD с помощью пользовательского интерфейса AVD Manager, разработчик также может создавать их, передавая аргументы командной строки инструменту android .
Откройте окно терминала и при необходимости перейдите в каталог .
Для создания каждого AVD разработчик выполняет команду android create avd с параметрами, указывающими имя для нового AVD, и разработчик образа системы хочет запускать на эмуляторе при вызове AVD. Разработчик также может указать другие параметры в командной строке, такие как размер эмулируемой SD-карты, оболочка эмулятора или настраиваемое расположение для файлов данных пользователя.
Вот пример использования командной строки для создания AVD:
android создать avd -n <имя> -t <идентификатор цели> [- <параметр> <значение>]...
Разработчик может использовать любое имя, которое разработчик пожелает для AVD, но поскольку разработчик, вероятно, будет создавать несколько AVD, разработчик должен выбрать имя, которое позволяет разработчику распознавать общие характеристики, предлагаемые AVD. Идентификатор цели — это целое число, присвоенное инструментом android . Идентификатор цели не является производным от имени, версии или уровня API образа системы или другого атрибута, поэтому разработчику необходимо выполнить команду android list target , чтобы вывести целевой идентификатор каждого образа системы.Разработчик должен сделать это до того, как разработчик запустит команду android create avd .
Когда вы выбрали целевого разработчика, которого хотите использовать, и записали его идентификатор, используйте команду android create avd для создания AVD, указав целевой идентификатор в качестве аргумента -t . Вот пример создания AVD с именем «my_android1.5» и идентификатором цели «2» (стандартный образ системы Android 1.5 в списке выше):
android создать avd -n my_android1.5 -т 2
Если выбранный целевой разработчик был стандартным образом системы Android («Тип: платформа»), инструмент android затем спрашивает разработчика, хочет ли разработчик создать собственный профиль оборудования.
Android 1.5 - это базовая платформа Android.
Желает ли разработчик создать собственный профиль оборудования [нет]
Если разработчик хочет установить пользовательские параметры эмуляции оборудования для AVD, введите «да» и установите необходимые значения. Если разработчик хочет использовать параметры аппаратной эмуляции по умолчанию для AVD, просто нажмите клавишу возврата (по умолчанию «нет»).Инструмент android создает AVD с именем и запрошенным разработчиком сопоставления образа системы с указанным разработчиком параметров. Если разработчик создает AVD, целью которого является надстройка SDK, инструмент android не позволяет разработчику устанавливать параметры аппаратной эмуляции. Предполагается, что поставщик надстройки правильно установил параметры эмуляции для устройства, моделируемого надстройкой, и, таким образом, не позволяет разработчику сбросить параметры.
Настройка разрешения или плотности устройства
При тестировании приложения мы рекомендуем разработчику протестировать приложение в нескольких разных AVD, используя разные конфигурации экрана (разные комбинации размера и плотности).Кроме того, разработчик должен настроить AVD для работы с физическим размером, близким к реальному устройству.
Чтобы настроить AVD для определенного разрешения или плотности, выполните следующие действия:
- Используйте команду
create avdдля создания нового AVD, указав параметр--skinсо значением, которое ссылается либо на имя скина по умолчанию (например, «WVGA800»), либо на настраиваемое разрешение скина (например, 240 × 432). Вот пример:
android создать avd -n-t --skin WVGA800
- Чтобы указать настраиваемую плотность для оболочки, ответьте «да» на вопрос, хочет ли разработчик создать настраиваемый профиль оборудования для нового AVD.
- Продолжайте настраивать различные параметры профиля, пока инструмент не попросит разработчика указать «Абстрагированную плотность ЖК-дисплея» ( hw.lcd.de density ). Введите соответствующее значение, например «120» для экрана с низкой плотностью, «160» для экрана со средней плотностью или «240» для экрана с высокой плотностью.
- Установите любые другие параметры оборудования и завершите создание AVD.
В приведенном выше примере (средняя плотность WVGA) новый AVD будет имитировать 5,8-дюймовый экран WVGA.
В качестве альтернативы настройке конфигурации оболочки эмулятора разработчик может использовать плотность оболочки эмулятора по умолчанию и добавить параметр -dpi-device в командную строку эмулятора при запуске AVD.Например:
-avd WVGA800 -scale 96dpi -dpi-device 160
Расположение файлов AVD по умолчанию
Когда разработчик создает AVD, инструмент android создает для него специальный каталог на компьютере разработчика. Каталог содержит файл конфигурации AVD, изображение пользовательских данных и изображение SD-карты (если доступно), а также любые другие файлы, связанные с устройством. Обратите внимание, что каталог не содержит образа системы — вместо этого файл конфигурации AVD содержит сопоставление с образом системы, который он загружает при запуске AVD.
Инструмент android также создает файл для AVD в корне каталога .android / avd / на компьютере. Файл определяет расположение каталога AVD и всегда остается в корне каталога .android.
По умолчанию инструмент android создает каталог AVD внутри ~ / .android / avd / (в Linux / Mac), C: \ Documents and Settings \ в Windows XP, и C: \ Users \ в Windows 7 и Vista. Если разработчик хочет использовать настраиваемое расположение для каталога AVD, разработчик может сделать это, используя параметр -p , когда разработчик создает AVD:
android создать avd -n my_android1.5 -t 2 -p путь / к / my / avd
Если каталог .android размещен на сетевом диске, мы рекомендуем использовать опцию -p , чтобы разместить каталог AVD в другом месте. Файл .ini AVD остается в каталоге .android на сетевом диске независимо от расположения каталога AVD.
Перемещение AVD
Если разработчик хочет переместить или переименовать AVD, разработчик может сделать это с помощью этой команды:
android move avd -n <имя> [- <параметр> <значение>] ...
Обновление AVD
Если по какой-либо причине корневая папка платформы / надстройки изменила свое имя (возможно, из-за того, что пользователь установил обновление платформы / надстройки), AVD не сможет загрузить образ системы, который он отображается на. В этом случае команда android list target выдаст следующий результат:
Не удалось загрузить следующие виртуальные устройства Android:
Имя: foo
Путь: <путь> /.android / avd / foo.avd
Ошибка: недопустимое значение в image.sysdir. Запустите 'android update avd -n foo'
Чтобы исправить эту ошибку, используйте команду android update avd для пересчета пути к системным изображениям.
Удаление AVD
Разработчик может использовать инструмент android для удаления AVD. Вот использование команды:
android удалить avd -n <имя>
Когда разработчик выдает команду, инструмент android ищет AVD, соответствующий указанному имени, удаляет каталог и файлы AVD.
Android SDK включает эмулятор виртуального мобильного устройства, который запускается на компьютере. Эмулятор позволяет разработчику создавать прототипы, разрабатывать и тестировать приложения Android без использования физического устройства.
Эмулятор Android имитирует все аппаратные и программные функции типичного мобильного устройства, за исключением того, что он не может совершать настоящие телефонные звонки. Он предоставляет множество клавиш навигации и управления, которые разработчик может «нажимать» с помощью мыши или клавиатуры для генерации событий для приложения.Он также предоставляет экран, на котором отображается приложение вместе с любыми другими активными приложениями Android.
Чтобы облегчить разработчикам моделирование и тестирование приложений, эмулятор использует конфигурации Android Virtual Device (AVD). AVD позволяют разработчику определять определенные аппаратные аспекты эмулируемого телефона и позволяют разработчику создавать множество конфигураций для тестирования многих платформ Android и аппаратных перестановок. Когда приложение запущено на эмуляторе, оно может использовать службы платформы Android для вызова других приложений, доступа к сети, воспроизведения аудио и видео, хранения и извлечения данных, уведомления пользователя и визуализации графических переходов и тем.
Эмулятор также включает в себя различные возможности отладки, такие как консоль, с которой разработчик может регистрировать выходные данные ядра, моделировать прерывания приложений (например, приходящие SMS-сообщения или телефонные звонки), а также моделировать эффекты задержки и отключения в сети передачи данных.
Обзор
Эмулятор Android — это приложение, которое предоставляет виртуальное мобильное устройство, на котором разработчик может запускать приложения Android. Он запускает полный системный стек Android, вплоть до уровня ядра, который включает набор предустановленных приложений (таких как номеронабиратель), к которым разработчик может получить доступ из приложений.Разработчик может выбрать, какую версию разработчика системы Android хочет запустить в эмуляторе, настроив AVD, а разработчик также может настроить внешний вид мобильного устройства и сопоставления клавиш. При запуске эмулятора и во время выполнения разработчик может использовать различные команды и параметры для управления его поведением.
Образы системы Android, доступные через Android SDK Manager, содержат код для ядра Android Linux, собственных библиотек, виртуальной машины Dalvik и различных пакетов Android (таких как платформа Android и предустановленные приложения).Эмулятор обеспечивает динамическую двоичную трансляцию машинного кода устройства в ОС и архитектуру процессора машины разработки.
Эмулятор Android поддерживает множество аппаратных функций, которые могут быть найдены на мобильных устройствах, в том числе:
- ЦП ARMv5 и соответствующий блок управления памятью (MMU)
- 16-битный ЖК-дисплей
- Одна или несколько клавиатур (клавиатура Qwerty и соответствующие кнопки Dpad / Phone)
- Звуковой чип с возможностью вывода и ввода
- Разделы флэш-памяти (эмулируются с помощью файлов образа диска на машине разработки)
- GSM-модем, включая симулированную SIM-карту
- Камера, использующая веб-камеру, подключенную к компьютеру разработчика.
- Датчики, такие как акселерометр, используют данные с USB-устройства Android.
В следующих разделах более подробно описывается эмулятор и его использование для разработки приложений Android.
Виртуальные устройства Android и эмулятор
Чтобы использовать эмулятор, разработчик сначала должен создать одну или несколько конфигураций AVD. В каждой конфигурации разработчик указывает платформу Android для запуска в эмуляторе, а также набор аппаратных опций и оболочки эмулятора, которые разработчик хочет использовать.Затем, когда разработчик запускает эмулятор, разработчик указывает конфигурацию AVD, которую разработчик хочет загрузить.
Каждый AVD функционирует как независимое устройство с собственным хранилищем пользовательских данных, SD-картой и т. Д. Когда разработчик запускает эмулятор с конфигурацией AVD, он автоматически загружает данные пользователя и данные SD-карты из каталога AVD. По умолчанию эмулятор хранит пользовательские данные, данные SD-карты и кеш в каталоге AVD.
Для создания и управления AVD разработчик использует пользовательский интерфейс AVD Manager или инструмент android , который включен в SDK.
Запуск и остановка эмулятора
При разработке и тестировании приложения разработчик устанавливает и запускает приложение в эмуляторе Android. Разработчик может запустить эмулятор как отдельное приложение из командной строки, или разработчик может запустить его из среды разработки Eclipse. В любом случае разработчик указывает конфигурацию AVD для загрузки и любые параметры запуска, которые разработчик хочет использовать.
Разработчик может запускать приложение на одном экземпляре эмулятора или, в зависимости от потребностей, разработчик может запускать несколько экземпляров эмулятора и запускать приложение на нескольких эмулируемых устройствах.Разработчик может использовать встроенные команды эмулятора для имитации телефонных звонков GSM или SMS между экземплярами эмулятора, а разработчик может настроить перенаправление сети, которое позволяет эмуляторам отправлять данные друг другу.
Чтобы запустить экземпляр эмулятора из командной строки, перейдите в папку tools / SDK. Введите команду эмулятора следующим образом:
-avd[ ]
Это инициализирует эмулятор, загружает конфигурацию AVD и отображает окно эмулятора.Разработчик может одновременно запускать несколько экземпляров эмулятора, каждый со своей собственной конфигурацией AVD и областью хранения для пользовательских данных, SD-карты и т. Д.
Если разработчик работает в Eclipse, плагин ADT для Eclipse устанавливает приложение и запускает эмулятор автоматически, когда разработчик запускает или отлаживает приложение. Разработчик может указать параметры запуска эмулятора в диалоговом окне «Запуск / отладка» на вкладке «Цель». Когда эмулятор запущен, разработчик может выдавать консольные команды.
Чтобы остановить экземпляр эмулятора, просто закройте окно эмулятора.
Установка приложений на эмулятор
Если у разработчика нет доступа к Eclipse или подключаемому модулю ADT, разработчик может установить приложение на эмулятор с помощью утилиты adb. Перед установкой приложения разработчику необходимо собрать и упаковать его в .apk . После установки приложения разработчик может запустить эмулятор из командной строки, как описано ранее, используя любые необходимые параметры запуска. Когда эмулятор запущен, разработчик также может подключиться к консоли экземпляра эмулятора для выполнения необходимых команд.
Как код обновления разработчика, разработчик периодически упаковывает и устанавливает его на эмуляторе. Эмулятор сохраняет приложение и данные о его состоянии после перезапуска в разделе диска с пользовательскими данными. Чтобы обеспечить правильную работу приложения по мере его обновления разработчиком, разработчику может потребоваться удалить раздел пользовательских данных эмулятора. Для этого запустите эмулятор с опцией -wipe-data .
Использование аппаратного ускорения
Чтобы эмулятор Android работал быстрее и быстрее реагировал, разработчик может настроить его так, чтобы использовать преимущества аппаратного ускорения, используя комбинацию параметров конфигурации, определенных образов системы Android и драйверов оборудования.
Настройка ускорения графики
Внимание: Начиная с версии 17 SDK Tools, функция ускорения графики для эмулятора является экспериментальной; будьте внимательны к несовместимости и ошибкам при использовании этой функции.
Ускорение графики для эмулятора использует преимущества графического оборудования компьютера разработчика, в частности его графического процессора (GPU), для ускорения рисования экрана. Чтобы использовать функцию ускорения графики, у разработчика должны быть установлены следующие версии инструментов разработки Android:
- Android SDK Tools, редакция 17 или более поздняя
- Android SDK Platform API 15, редакция 3 или выше
Используйте Android SDK Manager для установки следующих компонентов: Не все приложения совместимы с аппаратным ускорением графики.В частности, приложение браузера и приложения, использующие компонент WebView , несовместимы с ускорением графики.
Чтобы настроить AVD для использования ускорения графики:
- Убедитесь, что у разработчика установлены необходимые компоненты SDK (перечисленные выше).
- Запустите AVD Manager и создайте новый AVD со значением Target Android 4.0.3 (API Level 15) , версия 3 или выше.
- Если разработчик хочет, чтобы ускорение графики было включено по умолчанию для этого AVD, в разделе Hardware щелкните New , выберите GPU emulation и установите значение Yes . Примечание. Разработчик также может включить ускорение графики, когда разработчик запускает эмулятор с помощью параметров командной строки, как описано в следующем разделе.
- Назовите экземпляр AVD и выберите любые другие параметры конфигурации. Внимание: Не выбирайте опцию Снимок: включено . Снимки не поддерживаются для эмуляторов с включенным ускорением графики.
- Щелкните Create AVD , чтобы сохранить конфигурацию эмулятора.
Если разработчик установил Эмуляция графического процессора на Да для AVD, то ускорение графики автоматически включается, когда разработчик запускает его.Если разработчик не включил эмуляцию графического процессора при создании AVD, разработчик все равно может включить ее во время выполнения.
Чтобы включить ускорение графики во время выполнения для AVD:
- Если разработчик запускает эмулятор из командной строки, просто укажите опцию
-gpu on:
emulator -avd
- Если разработчик запускает эмулятор из Eclipse, запустите приложение Android с помощью AVD с включенной опцией
-gpu on:- В Eclipse щелкните папку проекта Android и выберите Run> Run Configurations…
- На левой панели диалогового окна Run Configurations выберите конфигурацию запуска проекта Android или создайте новую конфигурацию.
- Щелкните вкладку Target .
- Выберите разработчика AVD, созданного в предыдущей процедуре.
- В поле Additional Emulator Command Line Options введите:
-gpu on - Запустить проект Android, используя эту конфигурацию запуска.
Настройка ускорения виртуальной машины
Внимание: Начиная с версии 17 SDK Tools, функция ускорения виртуальной машины для эмулятора является экспериментальной; будьте внимательны к несовместимости и ошибкам при использовании этой функции.
Многие современные ЦП предоставляют расширения для более эффективной работы виртуальных машин (ВМ). Использование преимуществ этих расширений с эмулятором Android требует некоторой дополнительной настройки системы разработки, но может значительно повысить скорость выполнения. Прежде чем пытаться использовать этот тип ускорения, разработчик должен сначала определить, поддерживает ли ЦП системы разработки одну из следующих технологий расширений виртуализации:
- Расширения технологии виртуализации Intel (VT, VT-x, vmx)
- Расширения виртуализации AMD (AMD-V, SVM) (поддерживаются только для Linux)
В спецификациях производителя ЦП должно быть указано, поддерживает ли он расширения виртуализации.Если ЦП не поддерживает одну из этих технологий виртуализации, разработчик не может использовать ускорение виртуальной машины. Расширения виртуализации обычно включаются через BIOS компьютера и часто по умолчанию отключены. Обратитесь к документации к системной плате, чтобы узнать, как включить расширения виртуализации.
После того, как разработчик определил, что ЦП поддерживает расширения виртуализации, убедитесь, что разработчик может работать в рамках этих дополнительных требований по запуску эмулятора внутри ускоренной виртуальной машины:
- Только x86 AVD — Разработчик должен использовать AVD, который использует целевой системный образ x86.AVD, использующие системные образы на базе ARM, не могут быть ускорены с помощью описанных здесь конфигураций эмулятора.
- Не внутри ВМ — Разработчик не может запустить эмулятор с ускорением ВМ внутри другой виртуальной машины, такой как VirtualBox или виртуальная машина, размещенная на VMWare. Разработчик должен запускать эмулятор непосредственно на системном оборудовании.
- Другие драйверы виртуальных машин — Если разработчик использует другую технологию виртуализации в системе, например VirtualBox или VMWare, разработчику может потребоваться выгрузить драйвер для этого программного обеспечения хостинга виртуальной машины перед запуском ускоренного эмулятора.
- OpenGL® Graphics — Эмуляция графики OpenGL ES может не работать на том же уровне, что и реальное устройство.
Чтобы использовать ускорение виртуальной машины с эмулятором, разработчику потребуется следующая версия инструментов разработки Android. Используйте Android SDK Manager для установки следующих компонентов:
- Android SDK Tools, редакция 17 или более поздняя
- Образ системы Android на базе x86
Если среда разработки соответствует всем требованиям для запуска эмулятора с ускорением виртуальной машины, разработчик может использовать AVD Manager для создания конфигурации AVD на основе x86:
- В Android SDK Manager убедитесь, что разработчик установил образ системы для архитектуры x86 для целевой версии Android.Если у разработчика не установлен образ системы x86 , выберите его в Android SDK Manager и установите его. Совет: системных образов перечислены под каждым уровнем API в SDK Manager. Системный образ x86 может быть доступен не для всех уровней API.
- Запустите AVD Manager и создайте новый AVD со значением x86 для поля CPU / ABI . Разработчику может потребоваться выбрать конкретное значение Target или выбрать значение Target , а затем выбрать конкретную опцию CPU / ABI .
- Назовите экземпляр эмулятора и выберите любые другие параметры конфигурации.
- Щелкните Create AVD , чтобы сохранить конфигурацию эмулятора.
Настройка ускорения ВМ в Windows
Ускорение виртуальной машины для Windows требует установки Intel Hardware Accelerated Execution Manager (Intel HAXM). Для программного обеспечения требуется процессор Intel с поддержкой технологии виртуализации (VT) и одна из следующих операционных систем:
- Windows 7 (32/64-бит)
- Windows Vista (32/64-бит)
- Windows XP (только 32-разрядная версия)
Для установки драйвера виртуализации:
- Запустите Android SDK Manager, выберите Extras , а затем выберите Intel Hardware Accelerated Execution Manager .
- После завершения загрузки выполните
/extras/intel/Hardware_Accelerated_Execution_Manager/IntelHAXM.exe - Следуйте инструкциям на экране для завершения установки.
- После завершения установки убедитесь, что драйвер виртуализации работает правильно, открыв окно командной строки и выполнив следующую команду:
sc запрос intelhaxm
Разработчик должен увидеть сообщение о состоянии, включающее следующую информацию:
SERVICE_NAME: intelhaxm
...
СОСТОЯНИЕ: 4 РАБОТАЮЩИЕ
...
Для запуска эмулятора на базе x86 с ускорением ВМ:
- Если разработчик запускает эмулятор из командной строки, просто укажите AVD на базе x86:
emulator -avd
- Если разработчик запускает эмулятор из Eclipse, запустите приложение Android с AVD на базе x86:
- В Eclipse щелкните папку проекта Android и выберите Run> Run Configurations…
- На левой панели диалогового окна Run Configurations выберите конфигурацию запуска проекта Android или создайте новую конфигурацию.
- Щелкните вкладку Target .
- Выберите ранее созданного разработчика AVD на базе x86.
- Запустить проект Android, используя эту конфигурацию запуска.
Разработчик может настроить объем памяти, доступной для расширения ядра Intel HAXM, повторно запустив его установщик.
Разработчик может прекратить использование драйвера виртуализации, удалив его. Повторно запустите установщик или используйте панель управления для удаления программного обеспечения.
Настройка ускорения ВМ на Mac
Для ускорения виртуальной машины на Mac требуется установка расширения ядра Intel Hardware Accelerated Execution Manager (Intel HAXM), чтобы эмулятор Android мог использовать расширения виртуализации ЦП.Расширение ядра совместимо с Mac OS X Snow Leopard (версия 10.6.0) и выше.
Для установки расширения ядра Intel HAXM:
- Запустите Android SDK Manager, выберите Extras , а затем выберите Intel Hardware Accelerated Execution Manager .
- После завершения загрузки выполните
/extras/intel/Hardware_Accelerated_Execution_Manager/IntelHAXM.dmg - Дважды щелкните значок IntelHAXM.mpkg , чтобы начать установку.
- Следуйте инструкциям на экране для завершения установки.
- После завершения установки убедитесь, что новое расширение ядра работает правильно, открыв окно терминала и выполнив следующую команду:
kextstat | grep intel
Разработчик должен увидеть сообщение о состоянии, содержащее следующее имя расширения, указывающее, что расширение ядра загружено:
com.intel.kext.intelhaxm
Для запуска эмулятора на базе x86 с ускорением ВМ:
- Если разработчик запускает эмулятор из командной строки, просто укажите AVD на базе x86:
emulator -avd
- Если разработчик запускает эмулятор из Eclipse, запустите приложение Android с AVD на базе x86:
- В Eclipse щелкните папку проекта Android и выберите Run> Run Configurations…
- На левой панели диалогового окна Run Configurations выберите конфигурацию запуска проекта Android или создайте новую конфигурацию.
- Щелкните вкладку Target .
- Выберите ранее созданного разработчика AVD на базе x86.
- Запустить проект Android, используя эту конфигурацию запуска.
Разработчик может настроить объем памяти, доступной для расширения ядра Intel HAXM, повторно запустив программу установки.
Разработчик может прекратить использование драйвера ядра виртуализации, удалив его. Перед его удалением выключите все работающие эмуляторы x86. Чтобы выгрузить драйвер ядра виртуализации, выполните следующую команду в окне терминала:
Судо / Система / Библиотека / Расширения / intelhaxm.kext / Содержание / Ресурсы / uninstall.sh
Настройка ускорения ВМ в Linux
Системы на базеLinux поддерживают ускорение виртуальных машин с помощью программного пакета KVM. Следуйте инструкциям по установке KVM в системе Linux и убедитесь, что KVM включен. Помимо выполнения инструкций по установке, имейте в виду следующие требования к конфигурации:
- Для запуска KVM требуются определенные права пользователя. Убедитесь, что у разработчика достаточно прав в соответствии с инструкциями по установке KVM.
- Если разработчик использует другую технологию виртуализации на платформе Linux, выгрузите драйвер ядра перед запуском эмулятора x86. Например, программа драйвера VirtualBox —
vboxdrv.
Для запуска эмулятора на базе x86 с ускорением виртуальной машины:
- Если разработчик запускает эмулятор из командной строки, запустите эмулятор с AVD на базе x86 и включите параметры KVM:
emulator -avd
- Если разработчик запускает эмулятор из Eclipse, запустите приложение Android с AVD на базе x86 и включите параметры KVM:
- В Eclipse щелкните папку проекта Android и выберите Run> Run Configurations…
- На левой панели диалогового окна Run Configurations выберите конфигурацию запуска проекта Android или создайте новую конфигурацию.
- Щелкните вкладку Target .
- Выберите ранее созданного разработчика AVD на базе x86.
- В поле Дополнительные параметры командной строки эмулятора введите:
-qemu -m 512-включить-kvm
- Запустить проект Android, используя эту конфигурацию запуска.
Важно: При использовании параметра командной строки -qemu убедитесь, что это последний параметр в команде. Все последующие параметры интерпретируются как параметры, специфичные для qemu.
Эмуляция SD-карты
Разработчик может создать образ диска, а затем загрузить его в эмулятор при запуске, чтобы имитировать наличие SD-карты пользователя в устройстве.Для этого разработчик может указать образ SD-карты, когда разработчик создает AVD, или разработчик может использовать утилиту mksdcard, включенную в SDK.
В следующих разделах описывается, как создать образ диска SD-карты, как скопировать на него файлы и как загрузить его в эмулятор при запуске.
Обратите внимание, что разработчик может загрузить образ диска только при запуске эмулятора. Точно так же разработчик не может удалить смоделированную SD-карту из работающего эмулятора. Однако разработчик может просматривать, отправлять файлы и копировать / удалять файлы с моделируемой SD-карты с помощью adb или эмулятора.
Эмулятор поддерживает эмулируемые карты SDHC, поэтому разработчик может создать образ SD-карты любого размера до 128 гигабайт.
Создание образа SD-карты
Есть несколько способов создать образ SD-карты. Самый простой способ — использовать AVD Manager для создания новой SD-карты, указав размер при создании AVD разработчиком. Разработчик также может использовать инструмент командной строки android при создании AVD. Просто добавьте параметр -c в команду:
android создать avd -n-t -c [K | M]
Параметр -c также можно использовать для указания пути к образу SD-карты для нового AVD.
Разработчик также может использовать инструмент mksdcard, включенный в SDK, для создания образа диска FAT32, который разработчик может загрузить в эмулятор при запуске. Разработчик может получить доступ к mksdcard в каталоге tools / SDK и создать такой образ диска:
mksdcard <размер> <файл>
Например:
mksdcard 1024M sdcard1.iso
Копирование файлов на образ SD-карты
После того, как разработчик создал образ диска, разработчик может скопировать на него файлы перед загрузкой в эмулятор.Для копирования файлов разработчик может смонтировать образ как устройство цикла, а затем скопировать в него файлы, или разработчик может использовать такую утилиту, как mtools , чтобы скопировать файлы непосредственно в образ. Пакет mtools доступен для Linux, Mac и Windows.
В качестве альтернативы разработчик может использовать команду adb push для перемещения файлов на образ SD-карты, пока он загружен в эмулятор.
Загрузка образа SD-карты
По умолчанию эмулятор загружает образ SD-карты, который хранится с активным AVD (см. Параметр запуска -avd ).
В качестве альтернативы разработчик может запустить эмулятор с флагом -sdcard и указать имя и путь к изображению (относительно текущего рабочего каталога):
эмулятор -sdcard <путь к файлу>
Работа с образами дисков эмулятора
Эмулятор использует монтируемые образы дисков, хранящиеся на машине разработки, для имитации разделов флэш-памяти (или аналогичных) на реальном устройстве. Например, он использует образ диска, содержащий специфичное для эмулятора ядро, систему Android, образ ramdisk и записываемые образы для пользовательских данных и смоделированной SD-карты.
Для правильной работы эмулятору требуется доступ к определенному набору файлов образа диска. По умолчанию эмулятор всегда ищет образы дисков в частной области хранения используемого AVD. Если при запуске эмулятора там нет изображений, он создает изображения в каталоге AVD на основе версий по умолчанию, хранящихся в SDK. Место хранения по умолчанию для AVD находится в ~ / .android / avd в OS X и Linux, C: \ Documents and Settings \ в Windows XP и C: \ Users \ в Windows Vista.
Чтобы разработчик мог использовать альтернативные или пользовательские версии файлов изображений, эмулятор предоставляет параметры запуска, которые переопределяют расположение и имена файлов по умолчанию для файлов изображений. Когда разработчик использует одну из этих опций, эмулятор ищет файл изображения по имени или местоположению изображения, указанным разработчиком; если он не может найти изображение, он возвращается к использованию имен и местоположения по умолчанию.
Эмулятор использует три типа файлов изображений: файлы изображений по умолчанию, файлы изображений времени выполнения и временные файлы изображений.В разделах ниже описывается, как переопределить расположение / имя каждого типа файла.
Файлы изображений по умолчанию
Когда эмулятор запускается, но не находит существующий образ пользовательских данных в активной области хранения AVD, он создает новый из версии по умолчанию, включенной в SDK. Образ пользовательских данных по умолчанию доступен только для чтения. Файлы изображений доступны только для чтения.
Эмулятор предоставляет параметр запуска -system, позволяющий разработчику переопределить место, где эмулятор ищет образ пользовательских данных по умолчанию.
Эмулятор также предоставляет параметр запуска, который позволяет разработчику переопределить имя образа пользовательских данных по умолчанию, как описано в следующей таблице. Когда разработчик использует эту опцию, эмулятор просматривает каталог по умолчанию или в произвольном месте (если разработчик указал -system).
Имя | Описание | Комментарии |
данные пользователя.изображение | Исходный образ диска с пользовательскими данными | Отмена с использованием -initdata <файл> . Также см. -data ниже. |
Образы среды выполнения: данные пользователя и SD-карта
Во время выполнения эмулятор считывает и записывает данные на два образа диска: образ пользовательских данных и (необязательно) образ SD-карты. Эти образы имитируют раздел пользовательских данных и съемный носитель на реальном устройстве.
Эмулятор предоставляет образ диска с пользовательскими данными по умолчанию.При запуске эмулятор создает образ по умолчанию как копию образа системных пользовательских данных (user-data.img), описанного выше. Эмулятор сохраняет новый образ с файлами активного AVD.
Эмулятор предоставляет параметры запуска, позволяющие разработчику переопределить фактические имена и места хранения загружаемых образов среды выполнения, как описано в следующей таблице. Когда разработчик использует одну из этих опций, эмулятор ищет указанный файл (ы) в текущем рабочем каталоге, в каталоге AVD или в произвольном месте (если разработчик указал путь с именем файла).
Имя | Описание | Комментарии |
userdata-qemu.img | Образ, в который эмулятор записывает пользовательские данные среды выполнения для уникального пользователя. | Переопределить с использованием -data , где — это путь к изображению относительно текущего рабочего каталога. Если разработчик предоставляет только имя файла, эмулятор ищет файл в текущем рабочем каталоге.Если файл по адресу не существует, эмулятор создает образ из файла userdata.img по умолчанию, сохраняет его под указанным именем разработчик и сохраняет в нем пользовательские данные при завершении работы. |
sdcard.img | Изображение, представляющее SD-карту, вставленную в эмулируемое устройство. | Переопределить с использованием -sdcard <путь к файлу> , где <путь к файлу> — это путь к изображению относительно текущего рабочего каталога.Если разработчик предоставляет только имя файла, эмулятор ищет файл в текущем рабочем каталоге. |
Образ данных пользователя
Каждый экземпляр эмулятора использует записываемое изображение пользовательских данных для хранения данных, относящихся к пользователю и сеансу. Например, он использует изображение для хранения уникальных данных установленных пользователем приложений, настроек, баз данных и файлов.
При запуске эмулятор пытается загрузить изображение пользовательских данных, сохраненное во время предыдущего сеанса. Он ищет файл в текущем рабочем каталоге, в каталоге AVD, описанном в предыдущем разделе, и в настраиваемом месте / имени, указанном разработчиком при запуске.
- Если он находит образ пользовательских данных, он монтирует этот образ и делает его доступным системе для чтения и записи пользовательских данных.
Если он не находит его, он создает образ, копируя системный образ пользовательских данных (userdata.img), описанный выше. При выключении устройства система сохраняет пользовательские данные в образе, чтобы они были доступны в следующем сеансе. Обратите внимание, что эмулятор сохраняет новый образ диска в месте / имени, указанном разработчиком в параметре запуска -data .Из-за конфигураций AVD, используемых в эмуляторе, каждый экземпляр эмулятора получает собственное выделенное хранилище. Больше нет необходимости использовать параметр -d для указания области хранения для конкретного экземпляра.
SD-карта
Дополнительно разработчик может создать записываемый образ диска, который эмулятор может использовать для имитации съемного хранилища на реальном устройстве.
Разработчиктакже может использовать инструмент Android для автоматического создания образа SD-карты при создании AVD.
Временные образы
Эмулятор создает два записываемых образа при запуске, которые он удаляет при выключении устройства. Изображения:
- Записываемая копия образа системы Android
- Образ раздела
/ cache
Эмулятор не позволяет переименовывать временный образ системы или сохранять его при выключении устройства.
Образ раздела / cache изначально пуст и используется браузером для кэширования загруженных веб-страниц и изображений.Эмулятор предоставляет -cache , который указывает имя файла, в котором будет сохраняться изображение / cache при выключении устройства. Если <файл> не существует, эмулятор создает его как пустой файл.
Разработчик также может отключить использование раздела кэша, указав опцию -nocache при запуске.
Эмулятор сети
Эмулятор предоставляет универсальные сетевые возможности, которые разработчик может использовать для настройки сложных сред моделирования и тестирования приложений.В следующих разделах представлена сетевая архитектура и возможности эмулятора.
Сетевое адресное пространство
Каждый экземпляр эмулятора работает за виртуальной службой маршрутизатора / брандмауэра, которая изолирует его от сетевых интерфейсов и настроек машины разработки, а также от Интернета. Эмулируемое устройство не может видеть машину разработки или другие экземпляры эмулятора в сети. Вместо этого он видит только то, что он подключен через Ethernet к маршрутизатору / межсетевому экрану.
Виртуальный маршрутизатор для каждого экземпляра управляет 10.Сетевое адресное пространство 0.2 / 24 — все адреса, управляемые маршрутизатором, имеют вид 10.0.2.
Сетевой адрес | Описание |
| 10.0.2.1 | Адрес маршрутизатора / шлюза |
| 10.0.2.2 | Специальный псевдоним для интерфейса обратной петли хоста (i.е., 127.0.0.1 на машине разработки) |
| 10.0.2.3 | Первый DNS-сервер |
| 10.0.2.4 / 10.0.2.5 / 10.0.2.6 | Необязательный второй, третий и четвертый DNS-серверы (если есть) |
| 10.0.2.15 | Собственный сетевой / Ethernet-интерфейс эмулируемого устройства |
| 127.0.0.1 | Собственный петлевой интерфейс эмулируемого устройства |
Обратите внимание, что одинаковые адреса используются всеми запущенными экземплярами эмулятора.Это означает, что если разработчик имеет два экземпляра, работающих одновременно на машине, у каждого будет свой маршрутизатор, а за ним у каждого будет IP-адрес 10.0.2.15. Экземпляры изолированы маршрутизатором, и , а не могут видеть друг друга в одной сети.
Также обратите внимание, что адрес 127.0.0.1 на машине разработки соответствует собственному интерфейсу обратной связи эмулятора. Если разработчик хочет получить доступ к службам, работающим на loopback-интерфейсе машины разработки (также известный как 127.0.0.1 на машине), разработчик должен использовать вместо него специальный адрес 10.0.2.2.
Наконец, обратите внимание, что предварительно выделенные адреса каждого эмулируемого устройства специфичны для эмулятора Android и, вероятно, будут сильно отличаться на реальных устройствах (которые также, скорее всего, будут иметь NAT-ed, то есть за маршрутизатором / брандмауэром)
Ограничения локальной сети
ПриложенияAndroid, работающие в эмуляторе, могут подключаться к сети, доступной на рабочей станции. Однако они подключаются через эмулятор, а не напрямую к оборудованию, и эмулятор действует как обычное приложение на рабочей станции.Это означает, что эмулятор и, следовательно, приложения Android имеют некоторые ограничения:
- Связь с эмулируемым устройством может быть заблокирована программой межсетевого экрана, запущенной на компьютере.
- Связь с эмулируемым устройством может быть заблокирована другим (физическим) межсетевым экраном / маршрутизатором, к которому подключена машина.
Виртуальный маршрутизатор эмулятора должен иметь возможность обрабатывать все исходящие TCP- и UDP-соединения / сообщения от имени эмулируемого устройства при условии, что сетевая среда машины разработки позволяет это делать.Нет никаких встроенных ограничений на номера портов или диапазоны, кроме ограничений, налагаемых операционной системой хоста и сетью.
В зависимости от среды эмулятор может не поддерживать другие протоколы (например, ICMP, используемый для «ping»), может не поддерживаться. В настоящее время эмулятор не поддерживает IGMP или многоадресную рассылку.
Использование перенаправления сети
Для связи с экземпляром эмулятора за виртуальным маршрутизатором разработчику необходимо настроить перенаправление сети на виртуальном маршрутизаторе.Затем клиенты могут подключаться к указанному гостевому порту на маршрутизаторе, в то время как маршрутизатор направляет трафик с / на этот порт на хост-порт эмулируемого устройства.
Чтобы настроить перенаправление сети, разработчик создает сопоставление хоста и гостевых портов / адресов на экземпляре эмулятора. Есть два способа настроить перенаправление сети: с помощью консольных команд эмулятора и с помощью инструмента ADB, как описано ниже.
Настройка перенаправления через консоль эмулятора
Каждый экземпляр эмулятора предоставляет консоль управления, к которой разработчик может подключиться для выполнения команд, специфичных для этого экземпляра.Разработчик может использовать консольную команду redir для настройки перенаправления по мере необходимости для экземпляра эмулятора.
Сначала определите номер консольного порта для целевого экземпляра эмулятора. Например, номер порта консоли для первого запущенного экземпляра эмулятора — 5554. Затем подключитесь к консоли целевого экземпляра эмулятора, указав его номер порта консоли следующим образом:
Telnet локальный хост 5554 После подключения используйте команду redir для работы с перенаправлением.Чтобы добавить перенаправление, используйте:
добавить <протокол>: <порт-хоста>: <порт гостя> , где <протокол> — это либо tcp , либо udp , а <порт-хоста> и <порт-гостя> устанавливают соответствие между собственной машиной и эмулируемой системой соответственно.
Например, следующая команда устанавливает перенаправление, которое обрабатывает все входящие TCP-соединения с хостом (разработчиком) на 127.0.0.1: 5000 и будет передавать их в эмулируемую систему 10.0.2.15:6000 .:
redir добавить tcp: 5000: 6000
Чтобы удалить перенаправление, разработчик может использовать команду redir del . Чтобы перечислить все перенаправления для конкретного экземпляра, разработчик может использовать список перенаправления .
Обратите внимание, что номера портов ограничены локальной средой. обычно это означает, что разработчик не может использовать номера портов хоста ниже 1024 без специальных прав администратора. Кроме того, разработчик не сможет настроить перенаправление для порта хоста, который уже используется другим процессом на компьютере.В этом случае redir генерирует соответствующее сообщение об ошибке.
Настройка перенаправления через ADB
Инструмент Android Debug Bridge (ADB) обеспечивает переадресацию портов, альтернативный способ для разработчика настроить перенаправление сети.
Обратите внимание, что в настоящее время ADB не предлагает никаких способов удаления перенаправления, кроме как путем отключения сервера ADB.
Настройка параметров DNS эмулятора
При запуске эмулятор считывает список DNS-серверов, которые система в настоящее время использует.Затем он сохраняет IP-адреса до четырех серверов в этом списке и при необходимости устанавливает им псевдонимы на эмулируемых адресах 10.0.2.3, 10.0.2.4, 10.0.2.5 и 10.0.2.6.
В Linux и OS X эмулятор получает адреса DNS-сервера, анализируя файл /etc/resolv.conf . В Windows эмулятор получает адреса, вызывая GetNetworkParams () API. Обратите внимание, что обычно это означает, что эмулятор игнорирует содержимое файла «hosts» ( / etc / hosts в Linux / OS X, % WINDOWS% / system32 / HOSTS в Windows).
При запуске эмулятора из командной строки разработчик также может использовать параметр -dns-server , чтобы вручную указать адреса используемых DNS-серверов, где
Использование эмулятора с прокси-сервером
Если эмулятор должен подключаться к Интернету через прокси-сервер, разработчик может использовать параметр -http-proxy при запуске эмулятора, чтобы настроить соответствующее перенаправление.В этом случае разработчик указывает информацию о прокси в в одном из следующих форматов:
http: // <имя машины>: <порт>
или
http: // <имя пользователя>: <пароль> @ <имя машины>: <порт>
Параметр -http-proxy заставляет эмулятор использовать указанный прокси HTTP / HTTPS для всех исходящих TCP-соединений. Перенаправление для UDP в настоящее время не поддерживается.
В качестве альтернативы разработчик может определить переменную среды http_proxy для значения, которое разработчик хочет использовать для .В этом случае разработчику не нужно указывать значение для в команде -http-proxy — эмулятор проверяет значение переменной среды http_proxy при запуске и автоматически использует ее значение, если оно определено. .
Разработчик может использовать опцию -verbose-proxy для диагностики проблем с подключением прокси.
Экземпляры межкомпонентного эмулятора
Чтобы один экземпляр эмулятора мог взаимодействовать с другим, разработчик должен настроить необходимое перенаправление сети, как показано ниже.
Предположим, что среда —
- A — машина для проявки
- B — это первый экземпляр эмулятора, работающий на A
- C — второй экземпляр эмулятора, также работающий на A
и разработчик хотят запустить сервер на B, к которому будет подключаться C, вот как разработчик может его настроить:
- Настройте сервер на B, прослушивая
10.0.2.15: - На консоли B настройте перенаправление с
A: localhost:наB: 10.0.2.15: - На C: клиент должен подключиться к
10.0.2.2:
Например, если разработчик хотел запустить HTTP-сервер, разработчик может выбрать как 80 и как 8080:
- B слушает 10.0.2.15:80
- На консоли B выполните команду
redir add tcp: 8080: 80 - C подключается к 10.0.2.2:8080
Отправка голосового вызова или SMS на другой экземпляр эмулятора
Эмулятор автоматически пересылает смоделированные голосовые вызовы и SMS-сообщения от одного экземпляра к другому.Для отправки голосового вызова или SMS используйте приложение номеронабиратель или приложение SMS соответственно из одного из эмуляторов.
Чтобы инициировать имитацию голосового вызова другому экземпляру эмулятора:
- Запустите приложение номеронабирателя на исходном экземпляре эмулятора.
- В качестве номера для набора введите номер консольного порта экземпляра, которому вы хотите позвонить. Разработчик может определить номер консольного порта целевого экземпляра, проверив заголовок его окна, где номер консольного порта указан как «Android Emulator (
)». - Нажмите «Набор». В целевом экземпляре эмулятора появится новый входящий вызов.
Чтобы отправить SMS-сообщение другому экземпляру эмулятора, запустите приложение SMS (если доступно). Укажите номер консольного порта целевого экземпляра эмулятора в качестве адреса SMS, введите текст сообщения и отправьте сообщение. Сообщение доставляется в целевой экземпляр эмулятора.
Developer также может подключиться к консоли экземпляра эмулятора для имитации входящего голосового вызова или SMS.
Использование консоли эмулятора
Каждый запущенный экземпляр эмулятора предоставляет консоль, которая позволяет разработчику запрашивать и контролировать среду эмулируемого устройства. Например, разработчик может использовать консоль для управления перенаправлением портов, сетевыми характеристиками и событиями телефонии во время работы приложения на эмуляторе. Для доступа к консоли и ввода команд используйте telnet для подключения к номеру порта консоли.
Чтобы подключиться к консоли любого запущенного экземпляра эмулятора в любое время, используйте эту команду:
telnet localhost <порт-консоли>
Экземпляр эмулятора занимает пару соседних портов: консольный порт и порт adb .Номера портов отличаются на 1, при этом порт adb имеет более высокий номер порта. Консоль первого экземпляра эмулятора, запущенного на данной машине, использует консольный порт 5554 и adb порт 5555. Последующие экземпляры используют номера портов, увеличивающиеся на два — например, 5556/5557, 5558/5559 и т. Д. До 16 одновременных экземпляров эмулятора могут запускать средство консоли.
Для подключения к консоли эмулятора разработчик должен указать допустимый порт консоли. Если запущено несколько экземпляров эмулятора, разработчику необходимо определить консольный порт разработчика экземпляра эмулятора, к которому он хочет подключиться.Разработчик может найти консольный порт экземпляра, указанный в заголовке окна экземпляра. Например, вот заголовок окна для экземпляра с консольным портом 5554:
. Эмулятор Android (5554)
В качестве альтернативы разработчик может использовать команду adb devices, которая выводит список запущенных экземпляров эмулятора и номера их консольных портов. Эмулятор прослушивает соединения на портах 5554-5587 и принимает соединения только от localhost.
После подключения разработчика к консоли он может ввести help [команда] , чтобы просмотреть список команд консоли и узнать о конкретных командах.
Чтобы выйти из сеанса консоли, используйте quit или exit .
В следующих ниже разделах описаны основные функциональные области консоли.
Перенаправление порта
Разработчик может использовать консоль для добавления и удаления перенаправления портов во время работы эмулятора. После подключения разработчика к консоли настройте перенаправление порта, введя следующую команду:
redir <список | добавить | del>
Команда redir поддерживает подкоманды, перечисленные в таблице ниже.
Подкоманда | Описание | Комментарии |
список | Показать текущее перенаправление порта. | |
добавить <протокол>: <порт-хоста>: <порт-гостя> | Добавить новое перенаправление порта. |
|
del <протокол>: <хост-порт> | Удалить перенаправление порта. | Значения <протокол> и <порт-хоста> перечислены в предыдущей строке. |
Эмуляция поставщика геолокации
Разработчик может использовать консоль для установки географического местоположения, сообщаемого приложениям, работающим внутри эмулятора. Используйте команду geo , чтобы отправить простое исправление GPS в эмулятор, с форматированием NMEA 1083 или без него:
geo
Команда geo поддерживает подкоманды, перечисленные в таблице ниже.
Подкоманда | Описание | Комментарии |
fix <долгота> <широта> [<высота>] | Отправьте простое исправление GPS экземпляру эмулятора. | Укажите долготу и широту в десятичных градусах. Укажите высоту в метрах. |
nmea <предложение> | Отправить предложение NMEA 0183 на эмулируемое устройство, как если бы оно было отправлено с эмулируемого модема GPS. | <предложение> должно начинаться с «$ GP». В настоящее время поддерживаются только предложения «$ GPGGA» и «$ GPRCM». |
Разработчик может ввести команду geo сразу после запуска экземпляра эмулятора. Эмулятор устанавливает ввод разработчика местоположения, создавая имитацию поставщика местоположения. Этот провайдер отвечает на прослушиватели местоположения, установленные приложениями, а также предоставляет местоположение в LocationManager . Любое приложение может запросить диспетчер местоположения для получения текущего местоположения GPS для эмулируемого устройства, позвонив по телефону:
LocationManager.getLastKnownLocation ("GPS") Эмуляция аппаратных событий
Событие Консольные команды отправляют аппаратные события в эмулятор. Синтаксис этой команды следующий:
событие <отправить | типы | коды | текст>
Команда event поддерживает подкоманды, перечисленные в таблице ниже.
Подкоманда | Описание | Комментарии |
отправить <тип>: <код>: <значение> [...] | Отправить одно или несколько событий ядру Android. | Разработчик может использовать текстовые имена или целые числа для <тип> и <значение> . |
типы | Список всех псевдонимов строк <тип> , поддерживаемых подкомандами события . | |
коды <тип> | Список всех псевдонимов строк , поддерживаемых подкомандами события для указанного . | |
текст события <сообщение> | Имитация нажатия клавиш для отправки указанной строки символов в виде сообщения, | Сообщение должно быть строкой в кодировке UTF-8. Сообщения Unicode будут отображаться в обратном порядке в соответствии с текущей клавиатурой устройства. Неподдерживаемые символы будут автоматически отброшены. |
Характеристики мощности устройства
Команда power управляет состоянием питания, сообщаемым эмулятором приложениям.Синтаксис этой команды следующий:
power
Команда event поддерживает подкоманды, перечисленные в таблице ниже.
Подкоманда | Описание | Комментарии |
дисплей | Отображение состояния аккумулятора и зарядного устройства. | |
перем. Ток <вкл. | Выкл.> | Включите или выключите состояние зарядки от сети переменного тока. | |
статус <неизвестно | зарядка | разрядка | не заряжается | полный> | Измените состояние батареи, как указано. | |
присутствует <истина | ложь> | Установить состояние наличия батареи. | |
работоспособность <неизвестно | хорошо | перегрев | неисправно | перенапряжение | сбой> | Установить состояние работоспособности аккумулятора. | |
power health <процент> | Установите состояние оставшейся емкости аккумулятора (0-100). |
Состояние сети
Разработчик может использовать консоль для проверки состояния сети и текущих характеристик задержки и скорости. Для этого подключитесь к консоли и используйте команду netstatus . Вот пример команды и ее вывода.
статус сети
Эмуляция сетевой задержки
Эмулятор позволяет разработчику моделировать различные уровни задержки в сети, чтобы разработчик мог тестировать приложение в среде, более типичной для реальных условий, в которых оно будет работать.Разработчик может установить уровень или диапазон задержки при запуске эмулятора, или разработчик может использовать консоль для изменения задержки, пока приложение работает в эмуляторе.
Чтобы установить задержку при запуске эмулятора, используйте опцию эмулятора -netdelay с поддерживаемым значением , как указано в таблице ниже. Вот несколько примеров:
-netdelay gprsЭмулятор
-netdelay 40100
Чтобы внести изменения в сетевую задержку во время работы эмулятора, подключитесь к консоли и используйте команду netdelay с поддерживаемым значением из приведенной ниже таблицы.
сетевая задержка gprs
Формат сетевого <задержка> может быть одним из следующих (числа в миллисекундах):
Значение | Описание | Комментарии |
gprs | GPRS | (мин. 150, макс. 550) |
край | EDGE / EGPRS | (мин 80, макс 400) |
мкм | UMTS / 3G | (мин. 35, макс. 200) |
нет | Без задержки | (мин 0, макс 0) |
<число> | Имитация точной задержки (миллисекунды). | |
| Эмуляция указанного диапазона задержки (мин., Макс. Миллисекунды). |
Эмуляция скорости сети
Эмулятор также позволяет разработчику моделировать различные скорости передачи данных по сети. Разработчик может установить скорость или диапазон передачи при запуске эмулятора, или разработчик может использовать консоль для изменения скорости, пока приложение работает в эмуляторе.
Чтобы установить скорость сети при запуске эмулятора, используйте опцию эмулятора -netspeed с поддерживаемым значением , как указано в таблице ниже.Вот несколько примеров:
-netpeed gsmЭмулятор
-netspeed 14,4 80
Чтобы изменить скорость сети во время работы эмулятора, подключитесь к консоли и используйте команду netspeed с поддерживаемым значением из приведенной ниже таблицы.
скорость сети 14,4 80
Формат сети <скорость> может быть одним из следующих (числа — килобит / сек):
Значение | Описание | Комментарии |
г / м2 | GSM / CSD | (Вверх: 14.4, вниз: 14,4) |
hscsd | HSCSD | (вверх: 14,4, вниз: 43,2) |
gprs | GPRS | (вверх: 40,0, вниз: 80,0) |
край | EDGE / EGPRS | (вверх: 118,4, вниз: 236,8) |
мкм | UMTS / 3G | (вверх: 128,0, вниз: 1920,0) |
HSDPA | HSDPA | (Вверх: 348.0, вниз: 14400.0) |
полный | без ограничений | (вверх: 0,0, вниз: 0,0) |
<число> | Установите точную скорость, используемую как для загрузки, так и для загрузки. | |
<вверх>: <вниз> | Устанавливайте точные ставки для загрузки и скачивания отдельно. |
Эмуляция телефонии
Эмулятор Android включает собственный модем с эмуляцией GSM, который позволяет разработчику моделировать функции телефонии в эмуляторе.Например, разработчик может имитировать входящие телефонные звонки, устанавливать соединения для передачи данных и завершать их. Система Android обрабатывает имитированные вызовы точно так же, как и реальные вызовы. Эмулятор не поддерживает звук вызова.
Разработчик может использовать команду gsm для доступа к функциям телефонии эмулятора после подключения к консоли. Синтаксис этой команды следующий:
gsm <вызов | принять | занято | отменить | данные | удерживать | список | голос | статус>
Команда gsm поддерживает подкоманды, перечисленные в таблице ниже.
Подкоманда | Описание | Комментарии |
звонок <телефонный номер> | Имитация входящего телефонного звонка от | |
принять <телефонный номер> | Примите входящий вызов от | Разработчик может изменить состояние вызова на «активный», только если его текущее состояние — «ожидание» или «удержание». |
занято <телефонный номер> | Закройте исходящий вызов на | Разработчик может изменить состояние вызова на «занято», только если его текущее состояние — «ожидание». |
отменить <телефонный номер> | Завершение входящего или исходящего телефонного звонка на / от | |
данные <состояние> | Измените состояние подключения для передачи данных GPRS на <состояние>. | Поддерживаемые значения
|
удерживать | Измените состояние вызова на «удержание». | Разработчик может изменить состояние вызова на «удержание», только если его текущее состояние «активно» или «ожидает». |
список | Список всех входящих и исходящих вызовов и их состояний. | |
голос <состояние> | Измените состояние голосового соединения GPRS на <состояние>. | Поддерживаемые значения
|
статус | Сообщает о текущем состоянии голоса / данных GSM. | Значения описаны для команд voice и data . |
Эмуляция SMS
Консоль эмулятора Android позволяет разработчику сгенерировать SMS-сообщение и направить его экземпляру эмулятора. Как только разработчик подключится к экземпляру эмулятора, разработчик может сгенерировать смоделированное входящее SMS, используя следующую команду:
sms отправить
, где содержит произвольную числовую строку.
Консоль пересылает SMS-сообщение в платформу Android, которая передает его в приложение, которое обрабатывает этот тип сообщения.
Состояние ВМ
Разработчик может использовать команду vm для управления виртуальной машиной в экземпляре эмулятора. Синтаксис этой команды следующий:
vm
Команда vm поддерживает подкоманды, перечисленные в таблице ниже.
Подкоманда | Описание | Комментарии |
начало | Запустите виртуальную машину на экземпляре. | |
упор | Остановите виртуальную машину на экземпляре. | |
начало | Показать текущее состояние виртуальной машины (запущена или остановлена). |
Окно эмулятора
Разработчик может использовать команду window для управления окном эмулятора. Синтаксис этой команды следующий:
окно <масштаб>
Команда vm поддерживает подкоманды, перечисленные в таблице ниже.
Подкоманда | Описание | Комментарии |
шкала <шкала> | Масштабируйте окно эмулятора. | Число от 0,1 до 3, задающее коэффициент масштабирования. Разработчик также может указать масштаб как значение DPI, если разработчик добавит суффикс «dpi» к значению масштаба. Значение «auto» указывает эмулятору выбрать наилучший размер окна. |
Завершение работы экземпляра эмулятора
Разработчик может завершить работу экземпляра эмулятора через консоль, используя команду kill .
Ограничения эмулятора
Функциональные ограничения эмулятора включают:
- Нет поддержки для совершения или приема фактических телефонных звонков. Однако разработчик может моделировать телефонные звонки (исходящие и исходящие) через консоль эмулятора.
- Нет поддержки USB-подключений
- Нет поддержки наушников, подключенных к устройству
- Нет поддержки для определения состояния подключения к сети
- Нет поддержки для определения уровня заряда аккумулятора и состояния зарядки переменного тока
- Нет поддержки для определения вставки / извлечения SD-карты
- Нет поддержки Bluetooth
Устранение неполадок эмулятора
Утилита adb рассматривает эмулятор как реальное физическое устройство.По этой причине разработчику, возможно, придется использовать флаг -d с некоторыми общими командами adb , такими как install . Флаг -d позволяет разработчику указать, какое из нескольких подключенных устройств использовать в качестве цели команды. Если разработчик не указал -d , эмулятор нацелен на первое устройство в своем списке.
Для эмуляторов, работающих в Mac OS X, если разработчик видит ошибку Предупреждение: DNS-серверы не обнаружены при запуске эмулятора, проверьте, есть ли у разработчика файл / etc / resolv.conf файл. Если нет, запустите в командном окне следующую строку:
ln -s /private/var/run/resolv.conf /etc/resolv.conf
Настройка устройства для разработки
С помощью устройства на базе Android разработчик может разрабатывать и отлаживать приложения Android так же, как разработчик в эмуляторе. Прежде чем разработчик сможет начать, нужно сделать всего несколько вещей:
- Объявить приложение как «отлаживаемое» в Android Manifest. При использовании Eclipse разработчик может пропустить этот шаг, поскольку запуск приложения непосредственно из Eclipse IDE автоматически включает отладку.В файле
AndroidManifest.xmlдобавьтеandroid: debuggable = "true"к элементу - Включите «Отладку по USB» на устройстве. На устройстве перейдите в «Настройки »> «Приложения»> «Разработка » и включите USB-отладку (на Android 4.0, настройка находится в Настройки> Параметры разработчика ).
- Настроить систему для обнаружения устройства.
- Если вы разрабатываете в Windows, разработчику необходимо установить драйвер USB для adb.
- Если вы разрабатываете на Mac OS X, это просто работает. Пропустить этот шаг.
- Если вы разрабатываете на Ubuntu Linux, разработчик должен добавить файл правил
udev, содержащий конфигурацию USB для каждого типа устройств, которые разработчик хочет использовать для разработки.В файле правил каждый производитель устройства идентифицируется уникальным идентификатором поставщика, как указано в свойствеATTR {idVendor}. Чтобы настроить обнаружение устройств в Ubuntu Linux:- Войдите в систему как root и создайте этот файл:
/etc/udev/rules.d/51-android.rules. Используйте этот формат, чтобы добавить каждого поставщика в файл:
SUBSYSTEM == "usb", ATTR { idVendor} == "0bb4", MODE = "0666", GROUP = "plugdev"В этом примере идентификатор поставщика предназначен для HTC. НазначениеMODEопределяет разрешения на чтение / запись, аGROUPопределяет, какая группа Unix владеет узлом устройства. Примечание: Синтаксис правила может незначительно отличаться в зависимости от среды. При необходимости обратитесь к документации поudevпо системе. - Теперь выполните:
chmod a + r /etc/udev/rules.d/51-android.rules
- Войдите в систему как root и создайте этот файл:
При подключении через USB можно проверить подключение устройства, выполнив adb devices из каталога SDK platform-tools / . Если вы подключены, вы увидите имя устройства, указанное как «устройство».
Если вы используете Eclipse, запустите или отлаживайте приложение как обычно.Разработчику будет представлено диалоговое окно Device Chooser , в котором перечислены доступные эмуляторы и подключенные устройства. Выберите устройство, на которое разработчик хочет установить и запустить приложение.
При использовании Android Debug Bridge (adb) разработчик может выдавать команды с флагом -d для целевого подключенного устройства.
Предлагаемое видео
Обновления выпуска
Android Studio: драйвер гипервизора эмулятора Android для процессоров AMD
Это предназначено для пользователей AMD в Windows, которым нужна более быстрая работа с AVD наравне с HAXM или которые не могут работать с включенным Hyper-V / WHPX (например.g., запущенные другие механизмы виртуальных машин, такие как VMware / VirtualBox, или не работающие под управлением Windows 10; Однако обратите внимание, что мы по-прежнему привержены WHPX / Hyper-V для тех случаев, когда это оптимально, таких как взаимодействие с Docker в Windows).
Следуйте приведенным ниже инструкциям, чтобы включить его для ускорения работы с AVD на платформе AMD.
- Убедитесь, что ваш процессор AMD поддерживает виртуализацию и BIOS НЕ отключил ее. Поскольку параметры BIOS у разных производителей различаются, обратитесь к руководству производителя вашей системы.
- Для Windows 10: все функции Windows, включающие Hyper-V (явно или автоматически), должны быть отключены. См. Несколько примеров на скриншотах ниже.
- Запустите диспетчер SDK через Android Studio, и вы должны увидеть «Драйвер гипервизора эмулятора Android для процессоров AMD». Отметьте и нажмите «Применить». Менеджер SDK загрузит установочный пакет и распакует его в $ ANDROID_SDK_ROOT \ extras \ google \ Android_Emulator_Hypervisor_Driver.
Тогда:
- Откройте командную консоль Windows с правами администратора.
- Перейдите в $ ANDROID_SDK_ROOT \ extras \ google \ Android_Emulator_Hypervisor_Driver.
- Запустите silent_install.bat. Убедитесь, что вы видите желаемый вывод установщика: СОСТОЯНИЕ: 4 РАБОТАЕТ
Если что-то пойдет не так, сообщите о проблеме в Issuetracker. Обязательно отправьте модель вашего процессора, информацию о версии ОС и вывод установщика.
Примечание. В будущей версии Studio все это будет происходить автоматически в зависимости от текущей конфигурации ЦП.
Примечание. Это основано на переносе KVM для Windows.Мы откроем исходный код драйвера.
Это предназначено для пользователей AMD в Windows, которым нужна более быстрая работа с AVD наравне с HAXM или которые не могут работать с включенным Hyper-V / WHPX (например, с другими механизмами виртуальных машин, такими как VMware / VirtualBox, или без Windows 10; однако, обратите внимание, что мы по-прежнему привержены WHPX / Hyper-V для тех случаев, когда это оптимально, например, взаимодействие с Docker в Windows).
Следуйте приведенным ниже инструкциям, чтобы включить его для ускорения работы с AVD на платформе AMD.
- Убедитесь, что ваш процессор AMD поддерживает виртуализацию и BIOS НЕ отключил ее. Поскольку параметры BIOS у разных производителей различаются, обратитесь к руководству производителя вашей системы.
- Для Windows 10: все функции Windows, включающие Hyper-V (явно или автоматически), должны быть отключены. См. Несколько примеров на скриншотах ниже.
- Запустите диспетчер SDK через Android Studio, и вы должны увидеть «Драйвер гипервизора эмулятора Android для процессоров AMD».Отметьте и нажмите «Применить». Менеджер SDK загрузит установочный пакет и распакует его в $ ANDROID_SDK_ROOT \ extras \ google \ Android_Emulator_Hypervisor_Driver.
Тогда:
- Откройте командную консоль Windows с правами администратора.
- Перейдите в $ ANDROID_SDK_ROOT \ extras \ google \ Android_Emulator_Hypervisor_Driver.
- Запустите silent_install.bat. Убедитесь, что вы видите желаемый вывод установщика: СОСТОЯНИЕ: 4 РАБОТАЕТ
Если что-то пойдет не так, сообщите о проблеме в Issuetracker.Обязательно отправьте модель вашего процессора, информацию о версии ОС и вывод установщика.
Примечание. В будущей версии Studio все это будет происходить автоматически в зависимости от текущей конфигурации ЦП.
Примечание. Это основано на переносе KVM для Windows. Мы откроем исходный код драйвера.
Ошибка при запуске эмулятора: недостаточно места на диске для запуска AVD
Проблема не в размере жесткого диска, а в настройке, запрашивающей, сколько места на диске требуется эмулятору.
В Android Studio выполните следующие действия, чтобы уменьшить пространство на жестком диске, запрашиваемое эмулятором:
- Нажмите Инструменты -> AVD Manager
- Щелкните значок редактирования для эмулятора
- Нажмите Показать дополнительные настройки
- В разделе Память и хранилище уменьшите внутреннюю память , укажите что-то вроде 2048 МБ для эмулятора, поставляемого с магазином Google Play, или меньше для эмуляторов без магазина Google Play.
Попробуйте запустить еще раз и посмотрите, работает ли.
Если описанное выше не работает, попробуйте стереть пользовательские данные из эмулятора. Вы можете стереть пользовательские данные из разделов действий на экране AVD Manager.
Речь идет не о RAM , если вы новичок, просто используйте рекомендуемый объем RAM при создании нового AVD . Чтобы решить вашу конкретную проблему, перейдите на диск, на котором хранятся ваши файлы AVD , мой находится в этом пути :
E: \ avd.android \ avd \ Nexus_5X_API_27_1.avd
и освободите место на жестком диске. Ничего не удаляйте из папки avd! Если вы не знаете, на каком жестком диске хранятся ваши файлы AVD, перейдите к Tools-> AVD Manager
Выберите свой эмулятор и в его раскрывающемся списке нажмите кнопку Показать на диске . Он перенесет вас на этот жесткий диск, а затем просто освободит место. Не уверен в минимальном пространстве, у меня 20Gb , и он отлично работает, вы можете начать с минимум 5Gb.Также в этом раскрывающемся списке попробуйте сначала Wipe Data и запустите приложение, прежде чем пытаться сделать все, что упомянуто выше.
Просто выполните следующие шаги
1 Увеличивает размер внутренней памяти в AVD
2 Освободите диск C на своем компьютере из расчета 5–10 ГБ.
Эмулятор запустится автоматически. Надеюсь, это поможет
Установите эмулятор Android, добавьте AVD и подключите реальные устройства Отладка по USB
Для запуска приложения Android вам понадобится устройство — реальное или виртуальное.Диспетчер виртуальных устройств Android позволяет создавать виртуальные устройства Android (AVD), которые затем можно запускать для эмуляции устройства на своем компьютере. Android Virtual Device Manager создает среду тестирования с использованием ядра Linux и Android SDK, чтобы имитировать среду на физическом устройстве Android.
Эмулятор Android может эмулировать одно или несколько виртуальных устройств Android. Это отличный инструмент, который идет в комплекте с Android Studio. Эмулятор Android позволяет тестировать приложение на экранах разных размеров, конфигурациях оборудования, версиях Android и даже на разных архитектурах ЦП.
MyFirstApp (см. Создание нового проекта) — это законченный и «готовый к запуску проект», поэтому мы можем перейти к созданию и запуску приложения. Давайте посмотрим на ваше приложение в действии.
Диспетчер виртуальных устройств Android (AVD Manager)
Желательно создать несколько AVD с разными уровнями API и конфигурациями оборудования, чтобы ваше приложение можно было протестировать в разных версиях ОС Android. Создать новое виртуальное устройство Android очень просто.Чтобы открыть диспетчер AVD, нажмите кнопку «Диспетчер AVD» на панели инструментов или выберите «Инструменты »> «Android»> «Диспетчер AVD » в главном меню.
Поскольку вы еще не создавали виртуальное устройство, AVD Manager в настоящее время пуст. Нажмите кнопку Create Virtual Device , чтобы запустить мастер настройки виртуального устройства:
Появится список доступных устройств и выберите профиль устройства, который будет использоваться в качестве отправной точки для вашего AVD. Выберите Nexus S (вы можете выбрать любое устройство для создания виртуального устройства).
Категория позволяет выбрать тип устройства, которое вы хотите создать: телевизор, телефон, Wear или планшет. Кнопка New Hardware Profile позволяет вам создать собственное устройство для тестирования. Создание собственного профиля устройства может быть хорошей идеей для тестирования устройств, к которым у вас нет доступа. Кнопка Clone Device позволяет изменять любой профиль устройства из списка.
При нажатии кнопки «Далее» можно выбрать образ эмулятора для использования:
Рекомендуемые целевые объекты различаются в зависимости от профилей оборудования.Например, для Nexus S рекомендуемые цели начинаются с Android 5.1, а для Nexus 5 рекомендуемые цели начинаются с Android 7.0. Вы можете выбрать что угодно, начиная с уровня API 16 (Android 4.1) и выше.
Что такое ABI
Двоичный интерфейс приложения (ABI) определяет, как машинный код вашего приложения будет работать на вашем ЦП.Примечание:
Android Studio автоматически выведет список рекомендуемых образов системы на основе выбранного профиля оборудования.Если вы хотите выбрать другой образ системы, отличный от рекомендованного, выберите вкладку x86 изображений , если ваш компьютер использует ЦП Intel, для ЦП не на базе Intel вы должны выбрать вкладку Другие изображения .
Если вы видите ссылку Загрузить рядом с выбранным образом, вы должны загрузить его, чтобы создать AVD для этого конкретного уровня API и комбинации архитектуры процессора. После еще одного диалогового окна лицензии и диалогового окна прогресса:
После того, как вы загрузили нужный образ, щелкните одно из них в мастере.Нажатие кнопки «Далее» позволяет завершить настройку AVD. Предлагается имя по умолчанию для AVD, хотя вы можете заменить его своим собственным значением. Я не менял значения по умолчанию, эти значения пока подойдут:
После нажатия кнопки «Готово» создается AVD, который отображается в диспетчере AVD. Теперь вы можете попробовать свои приложения для Android на этом AVD.
Вы установили AVD, теперь закройте окно AVD Manager, щелкните значок Play на панели инструментов и протестируйте приложение.
Запустите приложение на реальном устройстве Android
Физическое устройство может быть очень полезно для быстрого тестирования изменений в функциональности приложения. Настоящее устройство работает быстрее виртуальных устройств, а также позволяет тестировать приложения в реальных условиях.
Первый шаг — перевести устройство Android (например, телефон или планшет) в режим отладки USB. Это можно сделать, перейдя к
Settings, нажавDeveloper options, а затем , включив отладкуUSB.Параметры разработчика в Jelly Bean 4.2 или выше по умолчанию скрыты. Скорее всего, это сделано для того, чтобы сделать его доступным только для опытных пользователей, а не для обычных пользователей. Чтобы активировать или отменить скрытие
Параметры разработчикакоснитесьО телефоне(или «О программе»), коснитесь номера сборки семь раз . Вернитесь к настройкамПодключите устройство Android к USB-порту вашей системы (например,грамм. Ноутбук или ПК).
Щелкните значок воспроизведения на панели инструментов.
Щелкните свое устройство, когда появится окно
Select Deployment Target.Ваше устройство появится на панели
Connected Devices, выберите его и нажмите кнопкуOK, чтобы запустить приложение на выбранном вами устройстве.
Мое устройство не определяется Android Studio
Установка драйверов устройств решит вашу проблему.При использовании физического устройства для разработки Android необходимо установить на свой компьютер драйверы устройств . Обычно Windows 10 автоматически загружает и устанавливает эти драйверы. Для некоторых устройств необходимо посетить веб-сайт производителя устройства, чтобы получить и установить эти драйверы. Новейшие устройства Android вообще не нуждаются в драйверах.
, автор: BrainBellupdated
Объяснение технологии AVD | Термион
Техническая информация AVD
Характеристики системы:
- Компоненты проволочного привода: Узел привода Power-Drive отличается мощным противоскользящим приводом, высоким крутящим моментом и высокими температурными характеристиками.В результате получается привод подачи проволоки, который практически неуязвим, насколько позволяют современные технологии, при этом сохраняя при этом легкую конструкцию. Подающие ролики автоматически регулируются по диаметру проволоки и не допускают дефектов проволоки, таких как перегибы и колебания диаметра. Его уникально спроектированная система привода и выпрямления обеспечивает функции, недоступные ни в одной из конкурирующих моделей, и обеспечивает оптимальную производительность подачи проволоки. Например, сердечники проволоки невозможно выпрямить стандартными методами изгиба из-за их неоднородного направления изгиба.Четыре подающих ролика системы подачи AVD формируют проволоку и выпрямляют ее, результаты практически устранили несоответствие распылительных проволок на распылительной головке, что способствует надежности этой системы дуговой сварки. Только два разных набора подающих роликов позволяют распылять проволоку диаметром от 1/16 дюйма (1,6 мм) до 3/32 дюйма (2,4 мм).
- Модуль управления: Этот «запатентованный» модуль управляет всеми функциями распыления, электрические элементы управления были миниатюризированы до такой степени, что все они подходят к блоку подачи проволоки, что устраняет необходимость в электрическом шкафу.Он подключается к вилке для быстрого обслуживания в случае возникновения неисправности.
- Стабилизация дуги и контроль дугового короткого замыкания: Эта «подана заявка на патент» и «запатентованная» концепция электрической конструкции является секретом успеха при напылении проводов при малом токе. Устранено дуговое короткое замыкание при напылении и в процессе его нанесения; это исключило сварку проволоки в наконечнике, накопление тепла в системе гильзы и износ наконечника, вызванный электрохимическим осаждением.
- Автоматический Запуск без клипсования проводов: Исключено клипирование проводов для перезапуска; Первая функция цикла запуска — перевернуть провода, чтобы создать зазор для зажигания дуги.Если дуга не зажжется и провода снова закорочены, система будет повторять цикл запуска до тех пор, пока не начнется напыление.
- Машинное или роботизированное распыление: Система распыления Auto Arc особенно подходит для автоматизированного распыления. Широкий диапазон настроек скорости распыления позволяет использовать широкий диапазон скорости нанесения при одинаковом диаметре проволоки. Указанная выше функция автоматического запуска обеспечивает зажигание дуги с проволокой любого типа и размера без вмешательства оператора.
- Распылительная головка: Распылительная головка изготовлена из прочного легкого полиуретана, который может выдерживать высокие температуры без деформации, а также выдерживать неправильные условия работы в поле. Он может быть ручным или установленным на машине для автоматического распыления.
- Выводные соединители: Эта система была разработана с целью минимизировать количество электрических переходов, которые всегда являются источником проблем для электрических цепей с высокой энергией, поскольку эта дуговая система содержит.
- Узел рукоятки и спускового крючка: Этот новый тип узла рукоятки и спускового крючка был разработан для решения проблем надежности из-за отказов, вызванных пылью, а также для решения проблем безопасности и удобства использования оператором. Двухконтактный переключатель обеспечивает резервное копирование, а функция отсутствия фиксации гарантирует, что система отключится, если оператор потеряет контроль над пистолетом по какой-либо причине, например, в результате несчастного случая или медицинского несчастного случая. Эргономичный дизайн спускового крючка и рукоятки позволяет полностью контролировать работу ладонью и пальцами при длительных операциях с минимальным утомлением.Электрическая схема находится под низким напряжением и безопасна для воздействия; Кроме того, пластиковая конструкция обеспечивает полную электрическую изоляцию оператора. Спусковой механизм и механизм переключения сконструированы таким образом, чтобы его можно было обслуживать в полевых условиях, и если пыль все-таки скапливается внутри механизма, его можно разобрать и обычно исправить, продув с помощью воздушного пистолета.
- Аварийный останов: Этот выключатель предназначен для безопасности всего персонала в зоне дугового напыления.Любой, кто находится рядом с устройством подачи, может остановить операцию опрыскивания, нажав этот предохранительный выключатель.
- Универсальная тележка: Эта тележка была разработана для суровых условий термического напыления. Шины не сползают, а подшипники качения полностью герметичны, включая механизм поворота. Рама тележки обеспечивает защиту оборудования и удобство его перемещения и такелажа при необходимости.
- Модульная конструкция: Вся система построена по модульной конструкции с подключаемыми компонентами.Модуль управления находится в отдельном блоке с быстроразъемными соединениями, которые позволяют быстро заменить в полевых условиях, если возникнут проблемы. Вся система содержит быстроразъемные соединения для быстрой настройки и быстрого демонтажа.
- ДРУГИЕ ДОПОЛНИТЕЛЬНЫЕ ВОЗМОЖНОСТИ:
- Полный комплект запасных частей Угловые форсунки
- доступны для распыления за конструктивными элементами или внутри труб и других объектов.
- Барабанные системы дозирования позволяют использовать преимущества раздачи проволоки в больших количествах, что сводит к минимуму время простоя, что делает их идеальными для автоматизированных установок.
- Пульт дистанционного управления для; напряжение, сила тока и давление воздуха.
- Нет чтения Одинарный циферблат, базовый пакет.
Нажмите здесь, чтобы отправить запрос на расценки
, или позвоните нам сегодня по телефону 877-884-3428
Как предотвратить заболевание ОРВИ у ребенка. Какие меры профилактики наиболее действенны. Что делать, если ребенок все-таки заболел ОРВИ. Какие средства помогут быстрее справиться с вирусной . . .
Какие виды бандажей для беременных бывают. Как правильно подобрать и носить бандаж во время беременности. Когда нужно начинать использовать бандаж. Какие есть показания и противопоказания . . .